Difference between revisions of "Lisa/L"
m (→Overo) |
|||
| (19 intermediate revisions by 5 users not shown) | |||
| Line 1: | Line 1: | ||
<div style="float: right; width: 15%"><categorytree style="float:right; clear:right; margin-left:1ex; border: 1px solid gray; padding: 0.7ex;" mode=pages>Autopilots</categorytree></div> | |||
<div style="float: right; width: 45%; overflow: hidden">[[Image:lisa_l_top.png|right|500px|Lisa/L V1.0 top view]]</div> | |||
<div style="float: right; width: 40%">__TOC__</div> | |||
Lisa/L is a dual processor board autopilot designed to allow the possibility of using Linux for Paparazzi airborne code or advanced payload and path plannning. AN [[OMAP]]-based Gumstix [[Overo]] computer can be mounted directly to Lisa/L, with access to USB, SPI, and serial. The onboard STM32 microcontroller communicates with the Overo using a fast SPI interface. It can be used for both fixedwing and rotorcraft airframes. For links to additional documentation, please see [[Lisa|Lisa Overview page here]]. | |||
== Hardware Revision History == | |||
{|border="1" cellspacing="0" style="text-align:center" cellpadding="6" | |||
!''Version #''!!''Release Date''!!''Release Notes'' | |||
|- | |||
|v1.1||???||Next release of Lisa/L | |||
|- | |||
|v1.0||???||Initial release of Lisa/L | |||
|} | |||
For differences between versions, please [[Lisa/L#Detailed_Hardware_Revision_History|see below]]. | |||
Lisa/L is based on the 64-pin STM32F103RE processor featuring 64k of RAM and 512k of FLASH, which is part of the [http://www.st.com/internet/mcu/product/164485.jsp high-density performance line family]. | |||
Features: | |||
* STM32 microcontroller (CortexM3@72Mhz) [http://www.st.com/internet/com/TECHNICAL_RESOURCES/TECHNICAL_LITERATURE/DATASHEET/CD00191185.pdf STM32F103RE datasheet] | |||
* Numerous reconfigurable analog input channels 0V - 3.3V (2 channels with optional on-board resistor bridge) | |||
* 3x 3.3V TTL UART (5V tolerant) | |||
* 1x CAN | |||
* 6x PWM outputs | |||
* 1x R/C receiver PPM frame input (trig pin on UART1 connector) | |||
* 2x [http://en.wikipedia.org/wiki/Serial_Peripheral_Interface SPI] bus | |||
* 2x [http://en.wikipedia.org/wiki/I2c I<sup>2</sup>C] bus | |||
* 1x USB (client) connected to STM32 JTAG and Overo serial console | |||
* 2x switching power supply (3.3V and 5V) | |||
* 6.5V linear regulator for ADC | |||
* 8x status LEDs with attached test point | |||
* 1x absolute pressure sensor (for altitude) | |||
* 1x differential pressure sensor (for airspeed) | |||
* Integrated JTAG debug for STM32 | |||
* 1x Gumstix Overo Mount | |||
* 1x IMU mount | |||
* 30 grams (1.1 oz), not including Aspirin IMU or Gumstix Overo COM | |||
* 50mm x 90mm (2in x 3.6in) | |||
* 4 layer PCB design | |||
The Lisa/L is designed to have a Gumstix Overo mounted onboard. In addition there is an onboard location to mount an IMU. Specifically, the [[Booz/IMU|Booz IMU]] or the [[AspirinIMU|Aspirin IMU]] can be easily mounted and interfaced. There is also a low-profile mount available for the Aspirin IMU. | |||
<gallery widths=360px heights=255px> | |||
Image:lisa_l_bloc_diag_simple.png|Lisa/L simplified block diagram | |||
Image:lisa_l_top.png|Lisa/L v1.0 top view | |||
Image:lisa_l_bot.png|Lisa/L v1.0 bottom view | |||
</gallery> | |||
== Pinout == | |||
Pins Name and Type are specified with respect to the Autopilot Board. | |||
=== Lisa/L V1.1 === | |||
[[Image:LisaL-V1 1-top-labeled.png|900px]] | |||
[[Image:LisaL-V1 1-back-labeled.png|643px]] | |||
'''NOTE: The silkscreen on the PCB says that the 8th pin of the ADC/Spare header is PB2. This is incorrect, pin 8 is PD2.''' | |||
Lisa-L 0.99 LED order: | |||
green: 3, 5, 7, 1 | |||
red: 2, 4, 6, 0 | |||
NEED PINOUT TABLES HERE!!! | |||
=== Powering the Board === | |||
The board accepts input voltage from 6V to 18V. The power connector is from JST and known in the rc world as a BEC connector. | |||
== Schematic == | |||
Also see the [[Lisa/L#Downloads|Downloads]] section. | |||
= | === Lisa/L v1.0 === | ||
LisaL V1.0 Schematic Sheets 1 .. 6 | |||
<gallery> | |||
Image:LisaL_v1_0_schematic_1.png | LisaL V1.0 Schematic Sheet 1/6 | |||
Image:LisaL_v1_0_schematic_2.png | LisaL V1.0 Schematic Sheet 2/6 | |||
Image:LisaL_v1_0_schematic_3.png | LisaL V1.0 Schematic Sheet 3/6 | |||
Image:LisaL_v1_0_schematic_4.png | LisaL V1.0 Schematic Sheet 4/6 | |||
Image:LisaL_v1_0_schematic_5.png | LisaL V1.0 Schematic Sheet 5/6 | |||
Image:LisaL_v1_0_schematic_6.png | LisaL V1.0 Schematic Sheet 6/6 | |||
</gallery> | |||
=== Lisa/L v1.1 === | |||
LisaL V1.1 Schematic Sheets 1 .. 6 | |||
| | <gallery> | ||
| | Image:LisaL_v1_1_schematic_1.png | LisaL V1.1 Schematic Sheet 1/6 | ||
Image:LisaL_v1_1_schematic_2.png | LisaL V1.1 Schematic Sheet 2/6 | |||
Image:LisaL_v1_1_schematic_3.png | LisaL V1.1 Schematic Sheet 3/6 | |||
Image:LisaL_v1_1_schematic_4.png | LisaL V1.1 Schematic Sheet 4/6 | |||
Image:LisaL_v1_1_schematic_5.png | LisaL V1.1 Schematic Sheet 5/6 | |||
Image:LisaL_v1_1_schematic_6.png | LisaL V1.1 Schematic Sheet 6/6 | |||
</gallery> | |||
LisaL V1.1 place Ppans front and back | |||
<gallery> | |||
Image:LisaL_v1_1_placeplan_front.png | LisaL V1.1 Placeplan Front | |||
Image:LisaL_v1_1_placeplan_back.png | LisaL V1.1 Placeplan Back | |||
</gallery> | |||
= | == Examples of Airborne Equipment Electrical Connections == | ||
Need some examples here, see [[Lisa/M_v20#Examples_of_Airborne_Equipment_Electrical_Connections]] or [[Umarim_v10#Examples_of_Airborne_Equipment_Electrical_Connections]] | |||
= | === R/C Receivers === | ||
==== Spektrum/JR remote receiver connection diagram ==== | |||
There is a Spektrum parser available, enabling the direct use of 1 or 2 Spektrum satellite receivers. | |||
[[Image:Lisa_L_V1_1_satellite_receiver_connection.png|500px]] | |||
==== PPM Remote receiver ==== | |||
To use the PPM signal of a PPM remote receiver, the input pin for the signal is the Trig.pin 1 (on UART1 connector), it is hardcoded and can not be changed. Also make sure that a bridge(~0 Ohm) in the conductor path is soldered. See below picture for the right position. | |||
[[Image:LisaL-V1 1-top-labeled-marked.png]] | |||
== PCB == | |||
=== Gerber & Drill Files === | |||
'''''Download Lisa/L gerber & drill files (zip)''''' ''NOT YET AVAILABLE BUT SEE [[Lisa/L#Downloads|Downloads]]'' | |||
Need some generated gerbers and drill files here. | |||
== Assembly == | |||
===Components Layout=== | |||
''NOT YET AVAILABLE BUT SEE [[Lisa/L#Downloads|Downloads]]'' | |||
Need some top and bottom of board images and line drawings here. | |||
= | === Bill Of Material === | ||
'''''Download Lisa/L Bill Of Material (zipped .xls file)''''' ''NOT YET AVAILABLE BUT SEE [[Lisa/L#Downloads|Downloads]]'' | |||
<br> | |||
<br> | |||
= | == PCB and assembled boards suppliers == | ||
Available on [[Get_Hardware|Get Hardware]] page, hopefully :) | |||
= | == Mechanical Dimensions == | ||
Lisa/L's four mounting holes fit M3 screws or standoffs. Their centers are in a square 43.8mm on a side. | |||
NEED LISA/L MECHANICAL DRAWING. | |||
== Downloads == | |||
'''Source files''' | |||
:*download available on GitHub: ''[https://github.com/paparazzi/paparazzi-hardware/tree/master/controller/lisa_l/ Cadsoft Eagle 6 Design]'' | |||
'''Gerber & Drill files''' | |||
:*download ''NOT YET AVAILABLE'' Need generated gerbers and drill files | |||
'''Assembly files''' | |||
:*download ''NOT YET AVAILABLE'' Need Lisa/L Components layouts (pdf) | |||
:*download ''NOT YET AVAILABLE'' Need Lisa/L Bill Of Material | |||
Lisa- | == JTAG == | ||
JTAG can be used to upload firmware through the onboard JTAG interface. It can also be used for debugging. It appears as the second USB device of Lisa/L, so if you don't have anything else connected as /dev/ttyUSB1 | |||
* [[JTAG]] description; | |||
* General [[Dev/Debugging|debugging information]]; | |||
* [[DevGuide/JTAG-Debug|JTAG usage]], includes Eclipse uplink tutorial. | |||
==Serial Firmware Upload== | |||
Now a boot sequence works as follows: | |||
#BOOT0 has to be set to 3.3V by use of a jumper cable | |||
#Connect a 3,3V serial cable (FTDI, MAX232...) to UART1. | |||
#Power the board and activate the bootloader program | |||
In the target section of the airframe file. | |||
= | <target name="ap" board="lisa_l_1.1"> | ||
<configure name="FLASH_MODE" value="SERIAL"/> | |||
Then upload as usual... | |||
= | == Detailed Hardware Revision History == | ||
NEED DETAILS BETWEEN VERSIONS HERE!!! | |||
[[Category:User_Documentation]] | [[Category:Lisa]] [[Category:User_Documentation]] [[Category:Autopilots]] | ||
Latest revision as of 19:15, 2 August 2013

Lisa/L is a dual processor board autopilot designed to allow the possibility of using Linux for Paparazzi airborne code or advanced payload and path plannning. AN OMAP-based Gumstix Overo computer can be mounted directly to Lisa/L, with access to USB, SPI, and serial. The onboard STM32 microcontroller communicates with the Overo using a fast SPI interface. It can be used for both fixedwing and rotorcraft airframes. For links to additional documentation, please see Lisa Overview page here.
Hardware Revision History
| Version # | Release Date | Release Notes |
|---|---|---|
| v1.1 | ??? | Next release of Lisa/L |
| v1.0 | ??? | Initial release of Lisa/L |
For differences between versions, please see below.
Lisa/L is based on the 64-pin STM32F103RE processor featuring 64k of RAM and 512k of FLASH, which is part of the high-density performance line family.
Features:
- STM32 microcontroller (CortexM3@72Mhz) STM32F103RE datasheet
- Numerous reconfigurable analog input channels 0V - 3.3V (2 channels with optional on-board resistor bridge)
- 3x 3.3V TTL UART (5V tolerant)
- 1x CAN
- 6x PWM outputs
- 1x R/C receiver PPM frame input (trig pin on UART1 connector)
- 2x SPI bus
- 2x I2C bus
- 1x USB (client) connected to STM32 JTAG and Overo serial console
- 2x switching power supply (3.3V and 5V)
- 6.5V linear regulator for ADC
- 8x status LEDs with attached test point
- 1x absolute pressure sensor (for altitude)
- 1x differential pressure sensor (for airspeed)
- Integrated JTAG debug for STM32
- 1x Gumstix Overo Mount
- 1x IMU mount
- 30 grams (1.1 oz), not including Aspirin IMU or Gumstix Overo COM
- 50mm x 90mm (2in x 3.6in)
- 4 layer PCB design
The Lisa/L is designed to have a Gumstix Overo mounted onboard. In addition there is an onboard location to mount an IMU. Specifically, the Booz IMU or the Aspirin IMU can be easily mounted and interfaced. There is also a low-profile mount available for the Aspirin IMU.
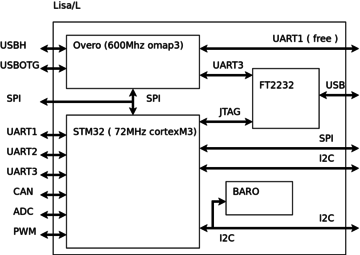
Lisa/L simplified block diagram
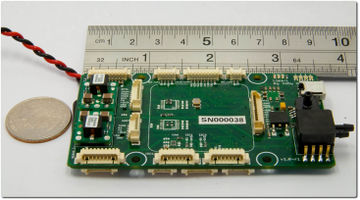
Lisa/L v1.0 top view
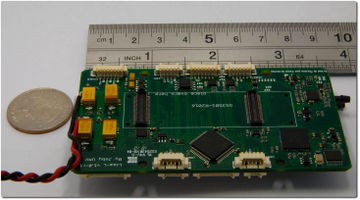
Lisa/L v1.0 bottom view


Pinout
Pins Name and Type are specified with respect to the Autopilot Board.
Lisa/L V1.1


NOTE: The silkscreen on the PCB says that the 8th pin of the ADC/Spare header is PB2. This is incorrect, pin 8 is PD2.
Lisa-L 0.99 LED order:
green: 3, 5, 7, 1 red: 2, 4, 6, 0
NEED PINOUT TABLES HERE!!!
Powering the Board
The board accepts input voltage from 6V to 18V. The power connector is from JST and known in the rc world as a BEC connector.
Schematic
Also see the Downloads section.
Lisa/L v1.0
LisaL V1.0 Schematic Sheets 1 .. 6

LisaL V1.0 Schematic Sheet 1/6

LisaL V1.0 Schematic Sheet 2/6

LisaL V1.0 Schematic Sheet 3/6

LisaL V1.0 Schematic Sheet 4/6

LisaL V1.0 Schematic Sheet 5/6

LisaL V1.0 Schematic Sheet 6/6






Lisa/L v1.1
LisaL V1.1 Schematic Sheets 1 .. 6

LisaL V1.1 Schematic Sheet 1/6

LisaL V1.1 Schematic Sheet 2/6

LisaL V1.1 Schematic Sheet 3/6

LisaL V1.1 Schematic Sheet 4/6

LisaL V1.1 Schematic Sheet 5/6

LisaL V1.1 Schematic Sheet 6/6






LisaL V1.1 place Ppans front and back

LisaL V1.1 Placeplan Front

LisaL V1.1 Placeplan Back


Examples of Airborne Equipment Electrical Connections
Need some examples here, see Lisa/M_v20#Examples_of_Airborne_Equipment_Electrical_Connections or Umarim_v10#Examples_of_Airborne_Equipment_Electrical_Connections
R/C Receivers
Spektrum/JR remote receiver connection diagram
There is a Spektrum parser available, enabling the direct use of 1 or 2 Spektrum satellite receivers.

PPM Remote receiver
To use the PPM signal of a PPM remote receiver, the input pin for the signal is the Trig.pin 1 (on UART1 connector), it is hardcoded and can not be changed. Also make sure that a bridge(~0 Ohm) in the conductor path is soldered. See below picture for the right position.

PCB
Gerber & Drill Files
Download Lisa/L gerber & drill files (zip) NOT YET AVAILABLE BUT SEE Downloads Need some generated gerbers and drill files here.
Assembly
Components Layout
NOT YET AVAILABLE BUT SEE Downloads Need some top and bottom of board images and line drawings here.
Bill Of Material
Download Lisa/L Bill Of Material (zipped .xls file) NOT YET AVAILABLE BUT SEE Downloads
PCB and assembled boards suppliers
Available on Get Hardware page, hopefully :)
Mechanical Dimensions
Lisa/L's four mounting holes fit M3 screws or standoffs. Their centers are in a square 43.8mm on a side.
NEED LISA/L MECHANICAL DRAWING.
Downloads
Source files
- download available on GitHub: Cadsoft Eagle 6 Design
Gerber & Drill files
- download NOT YET AVAILABLE Need generated gerbers and drill files
Assembly files
- download NOT YET AVAILABLE Need Lisa/L Components layouts (pdf)
- download NOT YET AVAILABLE Need Lisa/L Bill Of Material
JTAG
JTAG can be used to upload firmware through the onboard JTAG interface. It can also be used for debugging. It appears as the second USB device of Lisa/L, so if you don't have anything else connected as /dev/ttyUSB1
- JTAG description;
- General debugging information;
- JTAG usage, includes Eclipse uplink tutorial.
Serial Firmware Upload
Now a boot sequence works as follows:
- BOOT0 has to be set to 3.3V by use of a jumper cable
- Connect a 3,3V serial cable (FTDI, MAX232...) to UART1.
- Power the board and activate the bootloader program
In the target section of the airframe file.
<target name="ap" board="lisa_l_1.1"> <configure name="FLASH_MODE" value="SERIAL"/>
Then upload as usual...
Detailed Hardware Revision History
NEED DETAILS BETWEEN VERSIONS HERE!!!