Lisa/M v1.0

Lisa/M is a small, general purpose autopilot designed with flexibility across multiple applications in mind. Small weight and size, with (optional) integrated Aspirin IMU and full size 0.1" servo headers make the Lisa/M suitable for both fixed-wing and rotorcraft vehicles. This autopilot is based on the STM32 for improved peripherals and faster processing.
Hardware Revision History
| Version # | Release Date | Release Notes |
|---|---|---|
| v1.0 | 09/2011 | Lisa/M |
| v0.1 | 09/2011 | Initial release of Lisa/M |
For detailed hardware revision history, please see below.
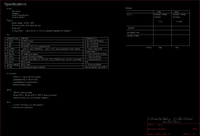
Features
- STM32 microcontroller STM32F105RCT6 datasheet with 256kB flash and 64kB RAM
- Pressure sensor BMP085
- 7 x Analog input channels
- 3 x Generic digital in-/out-puts
- 2 x 3.3V TTL UART (5V tolerant)
- 7 x Servo PPM outputs
- 1 x CAN bus
- 1 x SPI bus
- 1 x I2C bus
- 1 x Micro USB
- 4 x status LEDs with attached test point
- 10.8 grams (0.4 oz) (with Aspirin IMU mounted)
- 9.9 grams (0.35 oz) (without Aspirin IMU mounted)
- ~33mm x ~56mm x ~10mm
- 4 layers PCB design
with mounted IMU has the following additional sensors on board:
- 3 Axis Gyroscope
- 3 Axis Accelerometer
- 3 Axis Magnetometer
The pressure sensor is mounted directly on the board as this sensor is not provided by Aspirin (v0.1 - v1.1). Except for a GPS unit you have all necessary sensors for full attitude and altitude stabilization in an extremely small package.
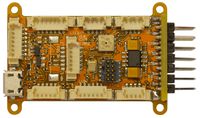
Lisa/M V1.0 top view

Lisa/M V1.0 bottom view

Lisa/M V1.0 top view

Lisa/M V1.0 bottom view



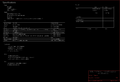
Pinout
Pins Name and Type are specified with respect to the Autopilot Board

| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | SERVOx | OUT | Servo signal (PWM) | Yellow |
| 2 | SV | PWR | Servo Voltage Rail | Red |
| 3 | GND | PWR | common ground | Black |
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | N/A | N/A | JTAG Debug Header | None |
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | UART1 V | PWR | UART Voltage (conf w/ JP6 and JP7) | Red |
| 3 | TX | OUT | USART1 Serial Output (3.3V level) | Yellow |
| 4 | RX | IN | USART1 Serial Input (3.3V level, 5V Tolerant???) | Orange |
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | +3V3 | PWR | 3.3V Rail from autopilot | Red |
| 3 | RX3 | IN | USART3 Serial Input (3.3V level) | Orange |
| 4 | GND | PWR | common ground | Black |
| 5 | +3V3 | PWR | 3.3V Rail from autopilot | Red |
| 6 | RX5 | IN | USART5 Serial Input (3.3V level) | Orange |
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | +3V3 | PWR | 3.3V Rail from autopilot | Red |
| 3 | PC10 | I/O | GPIO PC10 | Pink |
| 4 | PC12 | I/O | GPIO PC12 | Dark Tan |
| 5 | TRST | I/O | JTAG_TRST | Light Tan |
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | +3V3 | PWR | 3.3V Rail from autopilot | Red |
| 3 | +5V | PWR | 5V Rail from autopilot | Red |
| 4 | ADC4 | I/O | ADC4 | Magenta |
| 5 | ADC6 | I/O | ADC6 | Pink |
| 6 | BOOT | I/O | BOOT | Grey |
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | N/A | N/A | USB | None |
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | V_BATT | PWR | 3.3V Rail from autopilot | Red |
| 3 | V_IN | PWR | 5V Rail from autopilot | Red |
| 4 | CANL | I/O | CANL | Orange |
| 5 | CANH | I/O | CANH | Yellow |
| 6 | SCL | I/O | SCL | Green |
| 7 | SDA | I/O | SDA | Blue |
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | +3V3 | PWR | 3.3V Rail from autopilot | Red |
| 3 | MOSI | Out | MOSI | Orange |
| 4 | MISO | In | MISO | Yellow |
| 5 | SCK | Out | SCK | Green |
| 6 | SS | Out | SS | Blue |
| 7 | DRDY | I/O | DRDY | Dark Tan |
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | +3V3 | PWR | 3.3V Rail from autopilot | Red |
| 3 | +5V | PWR | 5V Rail from autopilot | Red |
| 4 | ADC1 | In | ADC4 | Green |
| 5 | ADC2 | In | ADC6 | Blue |
| 6 | ADC3 | In | BOOT | Light Tan |
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | VCC | PWR | UART Voltage | Red |
| 3 | TX | OUT | USART2 Serial Output (3.3V level) | Yellow |
| 4 | RX | IN | USART2 Serial Input (3.3V level, 5V Tolerant???) | Orange |
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | +3V3 | PWR | 3.3V Rail from autopilot | Red |
| 3 | SCL | I/O | SCL | Green |
| 4 | SDA | I/O | SDA | Blue |
Schematic
LisaM V1.0 Schematic Sheet 1/3

LisaM V1.0 Schematic Sheet 2/3

LisaM V1.0 Schematic Sheet 3/3



Examples of Airborne Equipment Electrical Connections
Small Aircraft Connection Diagram
Need an Umarim_v1.0-style ( here) small aircraft airborne equipment electrical connections here.
Large Aircraft Connection Diagram
Need an Umarim V1.0-style ( here) large aircraft airborne equipment electrical connections diagram here.
PCB
Gerber & Drill Files
Download Lisa/M v1.0 gerber & drill files (zip) NOT YET AVAILABLE BUT SEE Downloads Need some generated gerbers and drill files here.
Assembly
Components Layout
NOT YET AVAILABLE BUT SEE Downloads Need some top and bottom of board images and line drawings here.
Bill Of Material
Download Umarim v1.0 Bill Of Material (zipped .xls file) NOT YET AVAILABLE BUT SEE Downloads
PCB and assembled boards suppliers
Available on Get Hardware page, hopefully :)
Mechanical Dimensions

Downloads
Source files
- download available on GitHub: Lisa/M v1.0 Cadsoft Eagle 6 Design
Gerber & Drill files
- download NOT YET AVAILABLE Need generated gerbers and drill files
Assembly files
- download NOT YET AVAILABLE Need Lisa/M v1.0 Components layouts (pdf)
- download NOT YET AVAILABLE Need Lisa/M v1.0 Bill Of Material
Paparazzi USB Bootloader Upload
There is currently not a bootloader for STM32-based autopilots. Work is underway to remedy this, see Luftboot on GitHub. Right now, one must use JTAG to load firmware to the board, as seen here.
Required components
Connection Diagram
Boot Sequence
Detailed Hardware Revision History
Changes Between v1.1 and v2.0
- Lot's of silkscreen improvements
- Added attributes to all parts to make the usage of bom-ex ulp possible.
- Improved routing to allow teardropping
- Fixed stm32f1, f2 and f4 compatibility circuit. (has to jump to ground not to 3v3)
- Connected existing UART RX pullups to the respective connector power pins instead of 3v3. To prevent connecting 5V over IO pin to the 3v3 power rail.
- Added pullups on all UART RX lines to prevent undesired floatation.
- LED's are connected to 3v3 now. To make sure we don't have an issue with voltage tolerance on the gpio pins.
- ...
Changes Between v1.0 and v1.1
- Removed pull-ups on the USB gpio
- Removed pull-ups on the CAN gpio
- Connected usb_vbus to pa9 (needed by the USBotg)
- Removed USB pullup transistor as usbotg has a built in pullup
- Swapped UART1 with UART3 (uart1 was used for gps and pa9 was it's tx line, to be able to talk to the gps unit uart3 is a better choice, as uart1 only has an rx line now it is a better choice for spektrum RX modules)
- Removed USART3 TX gpio from the GPIO connector and moved to the GPS connector
- Added voltage selector jumpers to the RC RX connector; to enable powering of 3v3 or an 5v receivers
- Replaced vertical board solution with through hole servo pin headers (easier assembly)
- Servo connectors are in groups of two; for easier assembly
- Servo VBUS is connected together on all four layers; for lower resistance
- Moved LED's from under the analog2 connector; to be able to populate LED's and the connector
- Moved the RC RX connector a bit; to prevent crashing with the jtag plug
- Added one additional servo connector; now we have all 8 accessible through the standard servo connectors
- Fixed servo channel labeling to start at S0 as it is the case on TWOG and Tiny autopilot boards
- Added secondary through hole picoblade USB connector for easier routing of USB inside an airframe
- ...
Changes Between v0.1 and v1.0
- Switched to stm32f105 to be able to use usb and can at the same time
- Added alternative use of the adc lines as led output
- ...
Hardware Change Requests
- REQ: Replace BMP085 with MS5611 (the MS5611 seems to be better in performance then the BMP but it is more expensive and seems to be more difficult to obtain.
- A: This upgrade will be available through Aspirin v2.0 --Esden 22:54, 5 January 2012 (CET)
- REQ: Replace 7 Pin CAN with molex with something less risky to be inserted in 7 Pin SPI in relation to powering the board via CAN molex.
- REQ: Separate spot for external power if powered via separate battery. Realizing we can via Servo ports by Bridge J1 but still like to measure board voltage then and have a way to add power without mistakenly inject CAN Molex into SPI.
NEW CONTENT ABOVE
PAGE CURRENTLY UNDERGOING MAINTENANCE
OLD CONTENT BELOW
Introduction
If you consider yourself a developer this flexible piece of UAS hardware is for you. If you enjoy writing software and consider yourself an early adopter this is the board to use. Have fun implementing and extending the already great features. To show of your work and also to ask questions, you are welcomed on the paparazzi mailinglist, this Wiki and the freenode paparazzi IRC channel. This nice piece of hardware can be used for various purposes. Ofcourse as an Autopilot board, but only by uploading another firmware also a servo extension board and more. A good idea of how this nice piece of hardware looks like is shown on the Photos here. If you are not so interested in all of this at the moment since you just have this shiny new board on you desk and want to connect and fly the thing, then go to the page using the board as an Autopilot for an airplane or go here for uses a an Autopilot in a quadrotor
Initial Setup
If you want to just simply setup the board for use as an Autopilot and are looking for information about how to get the Lisa/M board up and running and where to connect other hardware just follow the link below if you have that great Lisa/M board and want to get get it airborne fast.
- Lisa/M/Tutorial/FixedWing - for an airplane, glider or flying wing;
- Lisa/M/Tutorial/RotorCraft - for everything that flies via moving blades: helicopters, quadrocopters or something alike.
Features
Lisa/M is based on the 64 pins STM32F105RCT6 processor featuring 64k of RAM and 256k of FLASH. All the pins are exposed, providing access to the complete set of the STM32 peripherals. NOTE: This MCU is different from LISA/L. Lisa/L is based on the 64 pins STM32F103RE processor featuring 64k of RAM and 512k of FLASH, which is high-density performance line family where STM32F105RCT6 of LISA/M is connectivity line family.
Overview
- STM32 microcontroller STM32F105RCT6 datasheet with 256kB flash and 64kB RAM
- Pressure sensor BMP085
- 7 x Analog input channels
- 3 x Generic digital in-/out-puts
- 2 x 3.3V TTL UART (5V tolerant)
- 7 x Servo PPM outputs
- 1 x CAN bus
- 1 x SPI bus
- 1 x I2C bus
- 1 x Micro USB
- 4 x status LEDs with attached test point
- 10.8 grams (0.4 oz) (with Aspirin IMU mounted)
- 9.9 grams (0.35 oz) (without Aspirin IMU mounted)
- ~33mm x ~56mm x ~10mm
- 4 layers PCB design
with mounted IMU has the following additional sensors on board:
- 3 Axis Gyroscope
- 3 Axis Accelerometer
- 3 Axis Magnetometer
The pressure sensor is mounted directly on the board as this sensor is not provided by Aspirin. Exept for a GPS unit you have all necessary sensors for full attitude and altitude stabilization in an extremely small package. Adding only an external GPS unit, it is a full fledged Autopilot.
Footprint
This autopilot is very small. The footprint is only 33mm by 56mm by 10mm including the servo connector pins. It will fit in a small UAS very well. There is a spot for mounting the Aspirin IMU directly on board.
MCU
In brief, the STM32 features 3 USARTS, 2 SPI, 2 I2C, 1 CAN, a plethora of timers, ADCs and a generic DMA able to serve all of them. On the board, a number of the communication interfaces are level shifted with user selectable voltage to allow interfacing with all kind of peripherals.
Onboard IMU
The Lisa/M comes with Aspirin IMU mounted, for easy attitude estimation in the smallest package possible.
JTAG
- JTAG description;
- General debugging information;
- JTAG usage, includes Eclipse uplink tutorial.
Hardware Revision History
Changes between v0.1 and v1.0
- Switched to stm32f105 to be able to use usb and can at the same time
- Added alternative use of the adc lines as led output
- ...
Changes between v1.0 and v1.1
- Removed pull-ups on the USB gpio
- Removed pull-ups on the CAN gpio
- Connected usb_vbus to pa9 (needed by the USBotg)
- Removed USB pullup transistor as usbotg has a built in pullup
- Swapped UART1 with UART3 (uart1 was used for gps and pa9 was it's tx line, to be able to talk to the gps unit uart3 is a better choice, as uart1 only has an rx line now it is a better choice for spektrum RX modules)
- Removed USART3 TX gpio from the GPIO connector and moved to the GPS connector
- Added voltage selector jumpers to the RC RX connector; to enable powering of 3v3 or an 5v receivers
- Replaced vertical board solution with through hole servo pin headers (easier assembly)
- Servo connectors are in groups of two; for easier assembly
- Servo VBUS is connected together on all four layers; for lower resistance
- Moved LED's from under the analog2 connector; to be able to populate LED's and the connector
- Moved the RC RX connector a bit; to prevent crashing with the jtag plug
- Added one additional servo connector; now we have all 8 accessible through the standard servo connectors
- Fixed servo channel labeling to start at S0 as it is the case on TWOG and Tiny autopilot boards
- Added secondary through hole picoblade USB connector for easier routing of USB inside an airframe
- ...
Changes between v1.1 and v2.0
- Lot's of silkscreen improvements
- Added attributes to all parts to make the usage of bom-ex ulp possible.
- Improved routing to allow teardropping
- Fixed stm32f1, f2 and f4 compatibility circuit. (has to jump to ground not to 3v3)
- Connected existing UART RX pullups to the respective connector power pins instead of 3v3. To prevent connecting 5V over IO pin to the 3v3 power rail.
- Added pullups on all UART RX lines to prevent undesired floatation.
- LED's are connected to 3v3 now. To make sure we don't have an issue with voltage tolerance on the gpio pins.
- ...
Hardware update requests
- REQ: Replace BMP085 with MS5611 (the MS5611 seems to be better in performance then the BMP but it is more expensive and seems to be more difficult to obtain.
- A: This upgrade will be available through Aspirin v2.0 --Esden 22:54, 5 January 2012 (CET)
- REQ: Replace 7 Pin CAN with molex with something less risky to be inserted in 7 Pin SPI in relation to powering the board via CAN molex.
- REQ: Separate spot for external power if powered via separate battery. Realizing we can via Servo ports by Bridge J1 but still like to measure board voltage then and have a way to add power without mistakenly inject CAN Molex into SPI.
Architecture
Usage scenarios
There are many potential applications for the small, relatively inexpensive and flexible Lisa/M. For regular Autopilot boards a full Lisa/M board is needed. For some scenarios just a basic Lisa/M without IMU and pressure sensor is needed, which reduces board cost. Here are some ideas (not all have yet been implemented):
- As a basic Autopilot
- To use the Lisa/M as an autopilot, we need to attach a GPS receiver. A nice uBlox LEA-5H or newer will perform great.
- As an advanced Autopilot
- Additional sensors for measuring airspeed, current, etc. would enhance a fixed-wing airframe.
- As a servo extender
- Sometimes being able to control seven actuators is just not enough. Large airframes may require flaps or an airbrake and automatic landing facilities. Maybe special ACL/Nav lights, or four cameras with zoom. By using a coupled second basic Lisa/M and connecting this to the master AP board we can extend the amount of servos. Large airframes can also benefit from remote and/or redundant servo drivers.
- As a Safety Pilot Device
- To provide an extra safety level required in some UAS challenges. A second Lisa board can make it easy to adhere to the rules for such a challenge.
- As a Data Logger
- Maybe you have a need only to log all kinds of data, like temperature, volts, amps, height, airspeed, and not control the aircraft. For this we can setup a Lisa/M board. Collecting this data can be to a storage medium like an micro SD card. Sometimes there is no need for realtime data collection through telemetry but just for storing a huge dataset.
- As a Camera controller
- On some models that do not require many servos (for example - flying wing with only 3 channels used), spare channels can be used for camera control. In addition, it could be used as an independent pan-tilt unit (PTU) controller.
- As a Airframe Tracker
- Tracking an airframe for an antenna or camera on a tripod is one of the many options to use a Lisa/M Board.
Pinout
Pins Name and Type are specified with respect to the Autopilot Board
Schematic
LisaM V1.0 Schematic Sheet 1/3

LisaM V1.0 Schematic Sheet 2/3

LisaM V1.0 Schematic Sheet 3/3
The up to date schematics files are also available from the Paparazzi hardware layout data server
Electrical Connections to the Airborne Equipment
Receivers
There is spectrum parser available already. Also UART pins can be used as general purpose I/O to be used for PPM input.
Additionally PPM encoder can be used to avoid receiver hardware modification.
PCB
Gerber & Drill Files
Assembly
Components Layout
Mechanical drawing
Bill Of Material
PCB and assembled boards suppliers
For private companies and enthusiast Paparazzi hardware suppliers, see Get Hardware page.
Downloads
The CAD files are also available from the Paparazzi hardware layout data server
Schematics
Source files
- download LisaM v1.00 Eagle design (zip)
Gerber & Drill files
- download gerber & drill files (zip)
Assembly files
- download (pdf)
- download (zipped .xls file)