Chimera/v1.00


Overview
- STMicro STM32F767 Micro Controller Unit (ARM Cortex-M7, 216 MHz CPU, FPU & DSP instructions, 2 Mbytes Flash, 512 Kbytes SRAM, General-purpose DMA,etc.)
- 9 DOF Inertial Measurement Unit
- Barometer/altimeter (I2C, IMU slave capability)
- Differential Pressure Sensor for Pitot tube
- microSD card (+ dedicated power supply for emergency files closing system)
- All connectors available both in standard 0.1” header and Molex Picoblade (except servos and R/C receiver, 0.1” header only)
- Dedicated serial link and power supply for "Companion Computer" (Beaglebone, Raspberry, Gumstix, ...)
- x4 status Leds + 8 segments LED display
- SWD debug connector (STM STLink compliant header)
- x8 Servos (+ Servos Power supply selection capabilities: Chimera onboard power supply or external source)
- x2 RC Receiver inputs (S.BUS, PPM & Spektrum Satellite compatible, including receiver binding)
- x5 UARTs (including one with hardware flow control signals)
- x1 I2C bus (3.3V and 5V logic level)
- x1 SPI bus (with Slave Select, Master or Slave)
- x1 CAN bus
- x8 auxiliary Inputs/Outputs spread over 2 connectors (x6 ADC, x6 Timers different from servos, x1 UART, x1 DAC)
- XBEE modem holder (ASSO and Reset connected to MCU GPIOs)
- x1 USB :
- DFU mode (download) or USB storage (direct access to MicroSD card)
- micro-USB plug (+ Picoblade & 0.1” header in //)
- Board can be flashed even if aircraft battery is off)
- Controlled Powerswitch 5V supply on AUX A (AUX0 to 3) header
- Twin switching power supply :
- source 2 to 6 Lipo cells (6 to 26v)
- 5v/3A for “Companion” Computer(controlled by GPIO)
- 5v/3A dedicated to Chimera (servos and other 5v peripherals)
- VBat+Gnd connectors for peripheral
- 89x60mm (3.5x2.4")
Hardware Revision History
| Version # | Release Date | Release Notes |
|---|---|---|
| v1.00 | 10/2016 | Initial release of Chimera |
Detailed Features
MicroSD card (SDIO)
- software support available with v5.2 and above
- hi-cap power designed to give enough time to cleanly save buffer and close file(s) when power outage detected
- USB-storage mode when plugging an USB cable after startup
On-board Sensors
- 9 DOF IMU
Invensense chip MPU-9250 : 9 DOF, 3 axis Accelerometer + 3 axis Gyroscope + 3 axis Magnetometer - Barometer/Altimeter
TE Connectivity module MS5611-01BA03 : High resolution Integrated digital pressure sensor, 10 to 1200 mbar, 24 bit ADC, I2C & SPI interface - Differential pressure sensor / Pitot
TE Connectivity transducer MS4525DO-DS5AI001DP : Digital Output Temperature and Differential Pressure sensor, Dual Sideport, 1PSI pressure range, I2C interface
USB Modes
- USB plugged before autopilot is powered : enter DFU mode to be flashed
New ! : Can be flashed even if autopilot is not powered. - USB plugged after autopilot is powered : stop ap task, enter usb storage mode to made sdcard content easily avalaible, after the host has mounted;copied;dismounted storage;unplugged usb, ap restart
SWD: Serial Wire Debug
Permits flash and source level debugging via SWD part of cheap discovery card, or via more capable, fastest, more expensive probe like black magic probe or CricketProbe
R/C Serial
Chimera offer two different R/C Receiver port allowing direct connection (3 pin) of several brand off-the-shelf receivers without hardware modification or external encoder board:
- RC1: PPM (Timer2 or 5 / Ch2) or S.BUS (inverted UART4 Rx) or Serial (non-inverted UART4 Rx) or Serial Spektrum satellite (non-inverted UART4 Rx + GPIO for binding procedure)
- RC2: S.BUS (inverted UART7 Rx) or Serial (non-inverted UART7 Rx) or Serial Spektrum satellite (non-inverted UART4 Rx + GPIO for binding procedure)
(see R/C Receivers and Radios page for compatible receivers)
Power
The input power source (Battery) voltage range of Chimera is 6V to 26V (2 to 6 Lipo cells)
- Twin Power Supply
- one 5V/3A dedicated to Chimera, servos (see Servo Power Supply selection below) and other 5V peripheral
- one 5V/3A dedicated to "Companion Computer" available on UART1 connector ("5V Comp.",#2) can be switched ON and OFF on demand using EN_COMP (MCU GPIO output PC04).
- EN_COMP = 1 => 5V Comp. OFF
- EN_COMP = 0 => 5V Comp. ON (default)
- Servo Power Supply selection
Chimera offer 2 options for servo power supply- Onboard 5V, provided total current (autopilot + external 5V modules + servos) does not exceed 3A.
- External 5V source (BEC) for special servo configuration
(see Servo Power options section below for more information)
- Power Switch
5V power output pin on AUX A connector ("5V Aux.",#2) can be switched ON and OFF on demand using APSW (MCU GPIO output PE06).- APSW = 0 => 5V Aux OFF
- APSW = 1 => 5V Aux ON (default)
The internal switch TPS2051B is designed to withstand 500mA continuous current and is short-circuit and thermally protected.
(see TPS2051B datasheet for recommended operation conditions)
Onboard Modem
Chimera offer two options for Modem:
- External Modem.
In this case, Modem should be plugged on "UART3" serial interface connector. - Onboard XBee module.
In this case, XBee pins are connected to :- Dout -> UART3 Rx (PD09)
- Din -> UART3 Tx (PD08)
- Asso -> GPIO (PA08)
- Reset -> GPIO (PE15)
Note : do not use UART3 Rx and Tx signals if XBee plugged.
Companion Computer
Chimera allows to easily connect a "Companion Computer" (Raspberry Pi, BeagleBoneBlack, Intel Edison, Odroid, etc.) to perform on-board computationally intensive tasks impossible to achieve by the autopilot alone.
This connection is made using "UART1" connector which offer:
- Dedicated 5V/3A supply (can be switched ON and OFF on demand using EN_COMP, GPIO output PC04)
- Serial interface UART1 Rx (PB07) & Tx (PB06) for fast communication
Communication Buses
- UART/Serial
5 UART serial communication:- x1 with hardware flow control signals (UART 2)
- x1 for GPS receiver (UART 3)
- x1 (free if no) modem XBee (UART8)
- x1 (free if no) “Companion Computer” (UART1)
- x1 free on AUX B connector (UART 6)
- I2C Bus
I2C2 interface (SDA2-PB11 and SCL2-PB10) is available in two voltage levels to allow connection of various types of external sensors:- 3.3V Logic ("I2C2 3V3" 2x 0.1" header and 2x Molex Picoblade connectors in //)
- 5V Logic ("I2C2 5V" 1x 0.1" header and 1x Molex Picoblade connectors in //)
Note: for testing purpose, I2C1 internal bus signals dedicated to IMU and IMU Slave I2C Bus dedicated to Barometer and Differential pressure sensor are available on 4 pads (or 4 pin MolexPicoblade connector if populated) next to the IMU.
- SPI Bus
SPI1 interface (MOSI1-PB5 MISO1-PB4 SCK1-PB3 NSS1-PA15) is available on "SPI1" connector.
If more than one selection signal (NSS1) is needed, use auxiliary pins (AUX0 to AUX7) configured as GPIO output
- CAN Bus
LEDs & Display
- 4x Leds classical paparazzi state diplay
- 1x 7 segment (plus dot) Led digit for extended mode display
Pictures










Pinout
Pins Name and Type are specified with respect to the Autopilot Board
General Pinout

| Pin # | Name | Type | MCU Port | Description |
|---|---|---|---|---|
| 1 | GND | PWR | - | common ground |
| 2 | +5V Comp. | PWR | Controlled by PC5 |
5V/3A specific for Companion Computer (PC5 = LOW => ON (default, pulldown) / PC5 = High => OFF) |
| 3 | +3.3V | PWR | - | 3.3V Rail from autopilot |
| 4 | RX1 | IN | PB7 | UART1 Serial Input (3.3V level, 5V tolerant) |
| 5 | TX1 | OUT | PB6 | UART1 Serial Output (3.3V level) |
| Pin # | Name | Type | MCU Port | Description |
|---|---|---|---|---|
| 1 | GND | PWR | - | common ground |
| 2 | +5V | PWR | - | 5V Rail from autopilot |
| 3 | +3.3V | PWR | - | 3.3V Rail from autopilot |
| 4 | RX2 | IN | PD6 | UART2 Serial Input (3.3V level, 5V tolerant) |
| 5 | TX2 | OUT | PD5 | UART2 Serial Output (3.3V level) |
| 6 | RTS2 | OUT | PD4 | UART2 Flow Control Request to Send (3.3V level) |
| 7 | CTS2 | IN | PD3 | UART2 Flow Control Clear to Send (3.3V level, 5V tolerant) |
| Pin # | Name | Type | MCU Port | Description |
|---|---|---|---|---|
| 1 | GND | PWR | - | common ground |
| 2 | +5V | PWR | - | 5V Rail from autopilot |
| 3 | +3.3V | PWR | - | 3.3V Rail from autopilot |
| 4 | RX3 | IN | PD9 | UART3 Serial Input (3.3V level, 5V tolerant) DO NOT USE if XBee module present on Chimera |
| 5 | TX3 | OUT | PD8 | UART3 Serial Output (3.3V level) DO NOT USE if XBee module present on Chimera |
| Pin # | Name | Type | MCU Port | Description |
|---|---|---|---|---|
| 1 | GND | PWR | - | common ground |
| 2 | +5V | PWR | - | 5V Rail from autopilot |
| 3 | +3.3V | PWR | - | 3.3V Rail from autopilot |
| 4 | RX8 | IN | PE0 | UART8 Serial Input (3.3V level, 5V tolerant) |
| 5 | TX8 | OUT | PE1 | UART8 Serial Output (3.3V level) |
| Pin # | Name | Type | MCU Port | Description |
|---|---|---|---|---|
| 1 | GND | PWR | - | common ground |
| 2 | +5V | PWR | - | 5V Rail from autopilot |
| 3 | +3.3V | PWR | - | 3.3V Rail from autopilot |
| 4 | SDA2 | Open Drain I/O |
PB11 | I2C2 bus Serial DAta (3.3V level, 1.5k pull-up) |
| 5 | SCL2 | Open Drain I/O |
PB10 | I2C12 bus Serial CLock (3.3V level, 1.5k pull-up) |
Note: 2 x Molex Picoblade and 2 x 0.1" Header are all in parallel
| Pin # | Name | Type | MCU Port | Description |
|---|---|---|---|---|
| 1 | GND | PWR | - | common ground |
| 2 | +5V | PWR | - | 5V Rail from autopilot |
| 3 | +3.3V | PWR | - | 3.3V Rail from autopilot |
| 4 | SDA2 | Open Drain I/O |
PB11 | I2C2 bus Serial DAta (5V level, 3.3k pull-up) |
| 5 | SCL2 | Open Drain I/O |
PB10 | I2C12 bus Serial CLock (5V level, 3.3k pull-up) |
| Pin # | Name | Type | MCU Port | Description |
|---|---|---|---|---|
| 1 | GND | PWR | - | common ground |
| 2 | +5V | PWR | - | 5V Rail from autopilot |
| 3 | +3.3V | PWR | - | 3.3V Rail from autopilot |
| 4 | NSS1 | OUT | PA15 | Slave Select. Selects the SPI slave |
| 5 | MOSI1 | I/O | PB5 | SPI1 Master Out Slave In. Data output from master / data input to slave |
| 6 | MISO1 | I/O | PB4 | SPI1 Master In Slave Out. Data input to master / data output from slave |
| 7 | SCK1 | I/O | PB3 | SPI1 Serial clock. Clock output from master or input to slave |
| Pin # | Name | Type | MCU Port | Description |
|---|---|---|---|---|
| 1 | GND | PWR | - | common ground |
| 2 | +5V Aux | PWR | Controlled by PC4 |
5V from autopilot through Power Switch (PC4 = LOW => OFF / PC4 = High => ON) |
| 3 | +3.3V | PWR | - | 3.3V Rail from autopilot |
| 4 | AUX0 | I/O | PA5 | General Purpose I/O / ADC1+2 in5 / DAC2 / TIM2 ch1 |
| 5 | AUX1 | I/O | PA3 | General Purpose I/O / ADC1+2+3 in3 / TIM2 ch4 / TIM5 ch4 / TIM9 ch2 |
| 6 | AUX2 | I/O | PA2 | General Purpose I/O / ADC1+2+3 in2 / TIM2 ch3 / TIM5 ch3 / TIM9 ch1 |
| 7 | AUX3 | I/O | PA0 | General Purpose I/O / ADC1+2+3 in0 / TIM2 ch1 / TIM5 ch1 |
| Pin # | Name | Type | MCU Port | Description |
|---|---|---|---|---|
| 1 | GND | PWR | - | common ground |
| 2 | +5V | PWR | - | 5V Rail from autopilot |
| 3 | +3.3V | PWR | - | 3.3V Rail from autopilot |
| 4 | AUX4 | I/O | PC3 | General Purpose I/O / ADC1+2+3 in13 |
| 5 | AUX5 | I/O | PC2 | General Purpose I/O / ADC1+2+3 in12 |
| 6 | AUX6 | I/O | PC6 | General Purpose I/O / TIM3 ch1 / TIM8 ch1 / UART6 Tx |
| 7 | AUX7 | I/O | PC7 | General Purpose I/O / TIM3 ch2 / TIM8 ch2 / UART6 Rx |
| Pin # | Name | Type | MCU Port | Description |
|---|---|---|---|---|
| 1 | GND | PWR | - | common ground |
| 2 | +5V | PWR | - | 5V Rail from autopilot |
| 3 | CANH | I/O | - | CAN bidirectional + line |
| 4 | CANL | I/O | - | CAN bidirectional - line |
Note: Embedded 120R terminator resistor.
| Pin # | Name | Type | MCU Port | Description |
|---|---|---|---|---|
| 1 | GND | PWR | - | common ground |
| 2 | USB+ | I/O | PA12 | USB bidirectional D+ line |
| 3 | USB- | I/O | PA11 | USB bidirectional D- line |
| 4 | VBUS | IN | PA9 | Indicates the presence of USB bus power (5V level), DFU or USB storage Mode selection (BOOT0 MCU pin) |
Note: MicroUSB, Molex Picoblade and 0.1" Header USB connectors are in parallel, only one can be connected at a time.
| Pin # | Name | Type | MCU Port | Description |
|---|---|---|---|---|
| 1 | +3.3V | PWR | - | 3.3V Rail from autopilot |
| 2 | SWCLK | IN | PA14 | SWD Serial Clock |
| 3 | GND | PWR | - | common ground |
| 4 | SWDIO | I/O | PA13 | SWD Serial Data |
| 5 | RST | IN | NRST | MCU Reset |
| 6 | NC | - | - | Not connected, for STM ST-LINK/V2 connector compliance |
Note: Pin to pin compatible with STM ST-LINK/V2 debug tool connector
| Pin # | Name | Type | Description |
|---|---|---|---|
| 1 | GND | PWR | common ground use only to power peripheral modules, DO NOT use as power supply input for autopilot |
| 2 | VBAT | PWR | + Rail from battery use only to power peripheral modules, DO NOT use as power supply input for autopilot |
R/C Receivers and Servos header pinout

| Pin # | Name | Type | MCU Port | Description |
|---|---|---|---|---|
| 1 | GND | PWR | - | common ground |
| 2 | +5V | PWR | - | 5V Rail from autopilot |
| 3 | RC1 | I/O | PA1 | Serial (SBUS, Spektrum, etc.) or PPM Stream RC receiver signal (5V Tolerant) UART4 Rx / TIM2 ch2 / TIM5 ch2 |
| Pin # | Name | Type | MCU Port | Description |
|---|---|---|---|---|
| 1 | GND | PWR | - | common ground |
| 2 | +5V | PWR | - | 5V Rail from autopilot |
| 3 | RC1 | IN | PE7 | Serial (SBUS, Spektrum, etc.) RC receiver signal (5V Tolerant) UART7 Rx |
| Pin # | Name | Type | MCU Port | Description |
|---|---|---|---|---|
| 1 | GND | PWR | - | common ground |
| 2 | +5V Servo | PWR | - | 5V Rail for Servos |
| 3 | SRV0 SRV1 SRV2 SRV3 SRV4 SRV5 SRV6 SRV7 |
OUT | PA6 PA7 PB0 PB1 PD12 PD13 PD14 PD15 |
Servo signal (PWM) |
Servo Power options
There is two options to supply connected servos.
Note : Whatever option is chosen, autopilot's ground already connected to servomotor's ground.
Powering Servos with Autopilot
This option can be used provided total current from 5V rail (autopilot + external 5V modules + servos) does not exceed 3A.
In this case, 5V servo rail must be connected to autopilot 5V rail as described below.

Warning: make sure shunt current rating exceed servos total consumption
A practical way of making this connection is to use a 2 or 3 way shunt like Samtec's MNT-103-BK-G (3.9A/pin)


Powering Servos using an external BEC/Power Source
This option must be used if total current from 5V rail may exceed 3A or for other special servo configuration.

Schematic
PCB
PCB and board production Files
Gerber & Drill
PCB design Eurocircuits 6-C class compliant:
- RS274X, units = Inches, format = 2:5
- Chimera_v100_Silkscreen_TOP.GBR (Top Component Print Layer)
- Chimera_v100_Soldermask_Top.GBR (Top Solder Mask)
- Chimera_v100_Paste_Mask_Top.GBR (Top Paste Mask, stencil)
- Chimera_v100_Signal_Top.GBR (Top Copper Layer)
- Chimera_v100_Internal_Plane_1.GBR (Internal Copper Layer GND)
- Chimera_v100_Internal_Plane_2.GBR (Internal Copper Layer +3.3V)
- Chimera_v100_Signal_Bottom.GBR (Bottom Copper Layer)
- Chimera_v100_Soldermask_Bottom.GBR (Bottom Solder Mask)
- Chimera_v100_Outline.GBR (Board Outline)
- Chimera_v100_Drill.GBR (NC XY coordinates & Drill tools sizes)
Pick-and-Place
- Chimera_v100_pick_place.csv
- Chimera_v100_pick_place.pik
- Chimera_v100_pick_place.txt
Assembly
Components Layout

Chimera v1.00 components Layout
(no Xbee modem & no differential pressure sensor)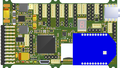
Chimera v1.00 components Layout
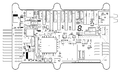
Chimera v1.00 components detail



Bill Of Material
Download Chimera v1.00 Bill of Material (zipped LibreOffice Calc & PDF file)
PCB and assembled boards suppliers
Check availability on Get Hardware page
Mechanical Dimensions
