Difference between revisions of "Lisa/MX"
AutumnLeaves (talk | contribs) |
AutumnLeaves (talk | contribs) |
||
| Line 3: | Line 3: | ||
<div style="float: right; width: 40%">__TOC__</div> | <div style="float: right; width: 40%">__TOC__</div> | ||
Lisa/MX features a very powerful 32bit ARM Cortex M4 micro processor, and is still backwards compatible to the Lisa/M you know and love. With the improved processing power and hardware accelerated Floating Point arithmetic the possibilities of what you can do with the platform are even greater than before. | Lisa/MX features a very powerful 32bit ARM Cortex M4 micro processor, and is still backwards compatible to the [[Lisa/M]] you know and love. With the improved processing power and hardware accelerated Floating Point arithmetic the possibilities of what you can do with the platform are even greater than before. | ||
The hardware was developed as part of the Paparazzi UAV framework project and is fully integrated and very well tested. | The hardware was developed as part of the Paparazzi UAV framework project and is fully integrated and very well tested. | ||
This version of the board does not support programming over the built in USB port (DFU bootloader). You will need the Black Magic Probe or compatible JTAG/SWD programmer to be able to use this board. | This version of the board does not support programming over the built in USB port (DFU bootloader). You will need the [[Debug_Probes|Black Magic Probe]] or compatible [[JTAG|JTAG/SWD programmer]] to be able to use this board. | ||
= Features = | = Features = | ||
Revision as of 06:17, 4 March 2016

Lisa/MX features a very powerful 32bit ARM Cortex M4 micro processor, and is still backwards compatible to the Lisa/M you know and love. With the improved processing power and hardware accelerated Floating Point arithmetic the possibilities of what you can do with the platform are even greater than before.
The hardware was developed as part of the Paparazzi UAV framework project and is fully integrated and very well tested.
This version of the board does not support programming over the built in USB port (DFU bootloader). You will need the Black Magic Probe or compatible JTAG/SWD programmer to be able to use this board.
Features
This board provides the following features:
- STM32F4 168MHz ARM Cortex-M4 microcontroller with FPU
- 1 Mbyte of Flash memory
- 192+4 Kbytes of SRAM including 64-Kbyte of CCM (core coupled memory) data RAM
- Cryptographic acceleration: hardware acceleration for AES 128, 192, 256, Triple DES, HASH (MD5, SHA-1), and HMAC
- True random number generator
- 3 axis gyroscope (connected over SPI for high speed sampling and low latency)
- 3 axis accelerometer (connected over SPI for high speed sampling and low latency)
- 3 axis magnetometer
- barometer
- I2C 5V level shifter for compatibility with 5V I2C ESCs
- CAN (Control Area Network) transceiver
- 2 TTL level serial ports for telemetry radio and GPS
- 1 high speed SPI interface for high speed hardware expansion
- 2 I2C interfaces for actuators and sensors
- 2 serial input interfaces for remote control receivers
- 1 CAN interface for actuators and sensors
- 1 USB port
- 8 PWM outputs/inputs for servos or legacy PPM RC receivers
- 3 Analog inputs for thermopiles, sensors or other

Lisa/MX V2.1 top view
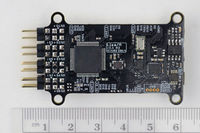
Lisa/MX V2.1 bottom view

Pinout


Schematic
Example Setup
Revision Changes
The newest Version 2.1 Revision 3 of the Lisa/MX autopilot. It has been improved from the predecessor V2.0 version of the board.
Removed BMP pressure sensor that has not been used for quite some time. Removed Analog 2 connector that was connected in parallel with the LEDs. Integrated Aspirin IMU into the board to save weight and production cost as well as increase reliability. Added "Bind button". No need for custom jumper wires any more when you want to bind your transmitter. Fixed USB power bus. The STM32 will not detect phantom USB devices in high ambient temperatures. Increased mounting hole size to the more common M3 screws.
Where to Buy
Lisa/MX V2.1 is available for purchase in the 1BitSquared store.