Difference between revisions of "YAPA/v2.0"
Jump to navigation
Jump to search
P0rc0 r0ss0 (talk | contribs) |
m |
||
| (7 intermediate revisions by 4 users not shown) | |||
| Line 1: | Line 1: | ||
== | {| align=right | ||
|- | |||
|<categorytree style="float:right; clear:right; margin-left:1ex; border: 1px solid gray; padding: 0.7ex;" mode=pages>Autopilots</categorytree> | |||
|} | |||
== [[YAPA]] v2 == | |||
* [[Media:yapa2.pdf]] Manual Only | * [[Media:yapa2.pdf]] Manual Only | ||
| Line 7: | Line 9: | ||
<gallery> | <gallery> | ||
Image: | Image:YAPA2_Wiring01.JPG|Wiring for GPS + I2C IMU | ||
Image:YAPA2_02_med.jpg|YAPA2 | Image:YAPA2_02_med.jpg|YAPA2 | ||
Image:yapa_v2_xsens.jpg|Sample Use [[http://www.youtube.com/watch?v=_JOgOLuDQXY]] | Image:yapa_v2_xsens.jpg|Sample Use [[http://www.youtube.com/watch?v=_JOgOLuDQXY]] | ||
| Line 48: | Line 50: | ||
<gallery> | <gallery> | ||
Image:Yapa_v2_5volt.jpg|AutoPilot 5V | Image:Yapa_v2_5volt.jpg|AutoPilot 5V | ||
Image:Yapa_i2c2.png|Second I2C Port | |||
Image:Yapa_v2_molex_gps.jpg|Molex GPS header | Image:Yapa_v2_molex_gps.jpg|Molex GPS header | ||
Image:Yapa_v2_molex_3pin_abuse.jpg|Some more significant Molex Abuse | Image:Yapa_v2_molex_3pin_abuse.jpg|Some more significant Molex Abuse | ||
Image:Yapa_v2_molex_3pin_abuse_result.jpg|Result | Image:Yapa_v2_molex_3pin_abuse_result.jpg|Result | ||
</gallery> | </gallery> | ||
[[Category:YAPA Autopilots]] | |||
Latest revision as of 06:36, 25 January 2013
YAPA v2
- Media:yapa2.pdf Manual Only
- Media:yapa2.zip Gerbers, BOMs, Pick-Place, PDF

Wiring for GPS + I2C IMU

YAPA2

Sample Use [[1]]

Comparison

A few

Running





Pinout
Pins Name and Type are specified with respect to the Autopilot Board

Features: Changelog from v1 to v2:
- 10 servo's instead of 8 (caution: standard pprz code only drives 8)
- extra ADC
- extra SPI pins
- GPS-reset
- Cam-Switch
- Remotely locatable USB (without need to unsolder the usb on the board)
- Remotely locatable XBee (or other) modem
- Resistor to select RS232 or 3.3V GPS/IMU/Modem
- 3 LED instead of 1
- More space around the mounting holes
5 Volt - Molex
Several people have asked where to find 5 Volt on yapa. The figure below shows all the power options. Here are some reasons why not all connectors have the 5V:
- yapa was specially designed to work with rs232 sensors such as XSens Mit-G/Crossbow NAV420/ig500/3DM-GX3/DMS-SGP02/MGL-sp-5 or any of such that all accept direct lipo supply
- the switching 5V is not very clean and not ideal for gps/imu (while many people use it though)
- the 5V is only present at the very top of the board and routing it accross to the bottom (gps/imu headers) would have compromised ground return paths of many signals and would have required more than 2-layer board
- the disadvantage of the 1/10th inch connectors is that they are big. To reduce the size not all pins are routed and not all power supplies are on all headers.
Other people have indicated that for some components like the GPS they prefered molex after all. While this was not the design goal there are some creative options, especially if you consider that 1.25mm pitch (molex) is nearly exactly half the 1/10th of an inch. See pictures below.

AutoPilot 5V
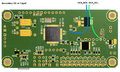
Second I2C Port

Molex GPS header

Some more significant Molex Abuse

Result




