Difference between revisions of "Apogee/v1.00"
Jump to navigation
Jump to search
| Line 9: | Line 9: | ||
__TOC__ | __TOC__ | ||
= Overview = | == Overview == | ||
* STMicroelectronics STM32F405 MCU based | * STMicroelectronics STM32F405 MCU based | ||
* 9(6) DOF integrated IMU MPU-9150(6050) based | * 9(6) DOF integrated IMU MPU-9150(6050) based | ||
| Line 42: | Line 32: | ||
* 53 x 25mm (2.1" x 0.98"), shares the same external dimensions and mounting points as UmarimLite | * 53 x 25mm (2.1" x 0.98"), shares the same external dimensions and mounting points as UmarimLite | ||
* 4 layers PCB design | * 4 layers PCB design | ||
== Hardware Revision History == | |||
{|border="1" cellspacing="0" style="text-align:center" cellpadding="6" | |||
!''Version #''!!''Release Date''!!''Release Notes'' | |||
|- | |||
|v1.00||07/2013||Initial release of Apogee | |||
|} | |||
== Detailed Features == | |||
=== SDIO (MicroSD card) === | |||
=== 6 or 9 DOF IMU === | |||
=== USB Modes === | |||
=== SWD: Serial Wire Debug === | |||
=== R/C Serial === | |||
=== Real Time Clock === | |||
=== Power Switch === | |||
<gallery> | <gallery> | ||
| Line 52: | Line 69: | ||
[[Image:Apogee_v100_pinout.png]] | [[Image:Apogee_v100_pinout.png]] | ||
{|border="1" cellspacing="0" style="text-align:center" cellpadding="2%" width="70%" | |||
|+'''SRV0/1/2/3/4/5''' | |||
!width="7%"|''Pin #''!!width="10%"|''Name''!!width="10%"|''Type''!!''Description''!!width="5%"|''Color'' | |||
|- | |||
|1||GND||PWR||common ground||style="background:black; color:white"|Black | |||
|- | |||
|2|| +5V||PWR||5V Rail from autopilot||style="background:Orange; color:white"|Orange | |||
|- | |||
|3||SRVx||OUT||Servo signal (PWM)||White | |||
|} | |||
{|border="1" cellspacing="0" style="text-align:center" cellpadding="2%" width="70%" | |||
|+'''R/C''' | |||
!width="7%"|''Pin #''!!width="10%"|''Name''!!width="10%"|''Type''!!''Description''!!width="5%"|''Color'' | |||
|- | |||
|1||GND||PWR||common ground||style="background:black; color:white"|Black | |||
|- | |||
|2|| +5v||PWR||5V Rail from autopilot||style="background:Orange; color:white"|Orange | |||
|- | |||
|3||PPM in||IN||PPM Stream from R/C Receiver (5V tolerant)||style="background:white; color:black"|White | |||
|- | |||
|4||RX2||IN||UART2 Serial Input (5V Tolerant), reversible||style="background:green; color:white"|Green | |||
|} | |||
{|border="1" cellspacing="0" style="text-align:center" cellpadding="2%" width="70%" | |||
|+'''UART1/4/6''' | |||
!width="7%"|''Pin #''!!width="10%"|''Name''!!width="10%"|''Type''!!''Description''!!width="5%"|''Color'' | |||
|- | |||
|1||GND||PWR||common ground||style="background:black; color:white"|Black | |||
|- | |||
|2|| +5V||PWR||5V Rail from autopilot||style="background:Orange; color:white"|Orange | |||
|- | |||
|3|| +3.3V||PWR||3.3V Rail from autopilot||style="background:Red; color:white"|Red | |||
|- | |||
|4||RX1/4/6||IN||UART1/4/6 Serial Input (3.3V level, 5V Tolerant)||style="background:green; color:white"|Green | |||
|- | |||
|5||TX1/4/6||OUT||UART1/4/6 Serial Output (3.3V level)||style="background:blue; color:white"|Blue | |||
|} | |||
{|border="1" cellspacing="0" style="text-align:center" cellpadding="2%" width="70%" | |||
|+'''I2C1/2''' | |||
!width="7%"|''Pin #''!!width="10%"|''Name''!!width="12%"|''Type''!!''Description''!!width="5%"|''Color'' | |||
|- | |||
|1||GND||PWR||common ground||style="background:black; color:white"|Black | |||
|- | |||
|2|| +5V||PWR||5V Rail from autopilot||style="background:Orange; color:white"|Orange | |||
|- | |||
|3|| +3.3V||PWR||3.3V Rail from autopilot||style="background:red; color:white"|Red | |||
|- | |||
|4||SDA1/2||Open Drain I/O<br>(1.5k pull-up)||I2C1/2 bus Serial DAta||style="background:sienna; color:white"|Brown | |||
|- | |||
|5||SCL1/2||Open Drain I/O<br>(1.5k pull-up)||I2C1/2 bus Serial CLock||style="background:blue; color:white"|Blue | |||
|} | |||
{|border="1" cellspacing="0" style="text-align:center" cellpadding="2%" width="70%" | |||
|+'''USB''' | |||
!width="7%"|''Pin #''!!width="10%"|''Name''!!width="10%"|''Type''!!''Description''!!width="5%"|''Color'' | |||
|- | |||
|1||GND||PWR||common ground||style="background:black; color:white"|Black | |||
|- | |||
|2||USB+||I/O||USB bidirectional D+ line||style="background:green; color:white"|Green | |||
|- | |||
|3||USB-||I/O||USB bidirectional D- line||style="background:white; color:black"|White | |||
|- | |||
|4||VBUS||IN||Indicates the presence of USB bus power (5V level)||style="background:orange; color:white"|Orange | |||
|} | |||
''Note: MiniUSB and Molex USB connectors are in parallel, only one can be connected at a time.'' | |||
{|border="1" cellspacing="0" style="text-align:center" cellpadding="2%" width="70%" | |||
|+'''SPI1''' | |||
!width="7%"|''Pin #''!!width="10%"|''Name''!!width="10%"|''Type''!!''Description''!!width="5%"|''Color'' | |||
|- | |||
|1||GND||PWR||common ground||style="background:black; color:white"|Black | |||
|- | |||
|2|| +5V||PWR||5V Rail from autopilot||style="background:Orange; color:white"|Orange | |||
|- | |||
|3|| +3.3V||PWR||3.3V Rail from autopilot||style="background:red; color:white"|Red | |||
|- | |||
|4||CS1||OUT||Slave Select. Selects the SPI slave (SSEL1)||style="background:sienna; color:white"|Brown | |||
|- | |||
|5||MOSI1||I/O||SPI1 Master Out Slave In. Data output from master / data input to slave||style="background:Grey; color:white"|Grey | |||
|- | |||
|6||MISO1||I/O||SPI1 Master In Slave Out. Data input to master / data output from slave||style="background:Green; color:white"|Green | |||
|- | |||
|7||SCK1||I/O||SPI1 Serial clock. Clock output from master or input to slave||style="background:Yellow; color:black"|Yellow | |||
|} | |||
{|border="1" cellspacing="0" style="text-align:center" cellpadding="2%" width="70%" | |||
|+'''AUX''' | |||
!width="7%"|''Pin #''!!width="10%"|''Name''!!width="10%"|''Type''!!''Port!!''Description''!!width="5%"|''Color'' | |||
|- | |||
|1||GND||PWR||||common ground||style="background:black; color:white"|Black | |||
|- | |||
|2|| +5V||PWR||||5V Rail from autopilot||style="background:Orange; color:white"|Orange | |||
|- | |||
|3|| +3.3V||PWR||||3.3V Rail from autopilot||style="background:Red; color:white"|Red | |||
|- | |||
|4||AUX1||I/O||PB1||General Purpose I/O #1 or ADC_1 Input or PWM6|| | |||
|- | |||
|5||AUX2||I/O||PC5||General Purpose I/O #2 or ADC_2 Input|| | |||
|- | |||
|6||AUX3||I/O||PC4||General Purpose I/O #3 or ADC_3 Input|| | |||
|- | |||
|7||AUX4||I/O||PB15||General Purpose I/O #4|| | |||
|} | |||
{|border="1" cellspacing="0" style="text-align:center" cellpadding="2%" width="70%" | |||
|+'''SWD''' | |||
!width="7%"|''Pin #''!!width="10%"|''Name''!!width="10%"|''Type''!!''Description''!!width="5%"|''Color'' | |||
|- | |||
|1||GND||PWR||common ground||style="background:black; color:white"|Black | |||
|- | |||
|2|| +3.3V||PWR||3.3V Rail from autopilot||style="background:red; color:white"|Red | |||
|- | |||
|3||RST||IN||MCU Reset||style="background:white; color:black"|White | |||
|- | |||
|4||SWCLK||IN||Serial Wire Clock||style="background:blue; color:white"|Blue | |||
|- | |||
|6||SWDIO||I/O||Serial Wire Data Input/Output||style="background:sienna; color:white"|Brown | |||
|} | |||
== Schematic == | == Schematic == | ||
| Line 85: | Line 231: | ||
[[Image:Apogee_v100_top_mechanical_dimensions.png|500px|Apogee v1.00 Top Mechanical Dimensions]] | [[Image:Apogee_v100_top_mechanical_dimensions.png|500px|Apogee v1.00 Top Mechanical Dimensions]] | ||
[[Image:Apogee_v100_side_mechanical_dimensions.png|500px|Apogee v1.00 Side Mechanical Dimensions]] | [[Image:Apogee_v100_side_mechanical_dimensions.png|500px|Apogee v1.00 Side Mechanical Dimensions]] | ||
== Programming == | |||
Apogee autopilot can reprogrammed in two different ways: | |||
* using the MCU native DFU USB bootloader over the on-board USB header (so pre-loading an "external" bootloader is useless) | |||
* using the SWD (Serial Wire Debug) connector | |||
=== Source code === | |||
Available in latest git master branch | |||
[[Category:Autopilots]] | |||
Revision as of 08:58, 23 July 2013


Overview
- STMicroelectronics STM32F405 MCU based
- 9(6) DOF integrated IMU MPU-9150(6050) based
- 1 x Barometer/altimeter MPL3115A2 (I2C, MPU slave capability)
- 1 x MicroSD card slot, 4 bit SDIO interface (high speed data logging)
- 1 x USB : DFU mode (download) or USB storage (direct access to MicroSD card)
- 6 x Servo PWM outputs
- 1 x R/C receiver PPM frame input
- 1 x R/C receiver serial input with inverter (Futaba S.BUS, Spektrum, etc.)
- 3 x UART
- 2 x I2C bus
- 1 x SPI bus
- RTC with backup capacitor
- SWD(ARM download/debug interface)
- 4 x Auxiliary I/O (General Purpose and/or ADC and/or servo PWM)
- 5v / 1.5A switching power supply (input voltage range 5.5V min → 17.0v max)
- 3.3v / 1A linear regulator
- 1 x 5v / 500mA power switch
- 4 x status LEDs
- ?? grams (?? oz)
- 53 x 25mm (2.1" x 0.98"), shares the same external dimensions and mounting points as UmarimLite
- 4 layers PCB design
Hardware Revision History
| Version # | Release Date | Release Notes |
|---|---|---|
| v1.00 | 07/2013 | Initial release of Apogee |
Detailed Features
SDIO (MicroSD card)
6 or 9 DOF IMU
USB Modes
SWD: Serial Wire Debug
R/C Serial
Real Time Clock
Power Switch
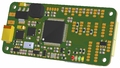
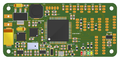
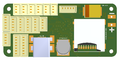
Apogee v1.00 3D bottom view
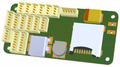
Apogee v1.00 3D top view


Pinout
Pins Name and Type are specified with respect to the Autopilot Board

| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | +5V | PWR | 5V Rail from autopilot | Orange |
| 3 | SRVx | OUT | Servo signal (PWM) | White |
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | +5v | PWR | 5V Rail from autopilot | Orange |
| 3 | PPM in | IN | PPM Stream from R/C Receiver (5V tolerant) | White |
| 4 | RX2 | IN | UART2 Serial Input (5V Tolerant), reversible | Green |
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | +5V | PWR | 5V Rail from autopilot | Orange |
| 3 | +3.3V | PWR | 3.3V Rail from autopilot | Red |
| 4 | RX1/4/6 | IN | UART1/4/6 Serial Input (3.3V level, 5V Tolerant) | Green |
| 5 | TX1/4/6 | OUT | UART1/4/6 Serial Output (3.3V level) | Blue |
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | +5V | PWR | 5V Rail from autopilot | Orange |
| 3 | +3.3V | PWR | 3.3V Rail from autopilot | Red |
| 4 | SDA1/2 | Open Drain I/O (1.5k pull-up) |
I2C1/2 bus Serial DAta | Brown |
| 5 | SCL1/2 | Open Drain I/O (1.5k pull-up) |
I2C1/2 bus Serial CLock | Blue |
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | USB+ | I/O | USB bidirectional D+ line | Green |
| 3 | USB- | I/O | USB bidirectional D- line | White |
| 4 | VBUS | IN | Indicates the presence of USB bus power (5V level) | Orange |
Note: MiniUSB and Molex USB connectors are in parallel, only one can be connected at a time.
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | +5V | PWR | 5V Rail from autopilot | Orange |
| 3 | +3.3V | PWR | 3.3V Rail from autopilot | Red |
| 4 | CS1 | OUT | Slave Select. Selects the SPI slave (SSEL1) | Brown |
| 5 | MOSI1 | I/O | SPI1 Master Out Slave In. Data output from master / data input to slave | Grey |
| 6 | MISO1 | I/O | SPI1 Master In Slave Out. Data input to master / data output from slave | Green |
| 7 | SCK1 | I/O | SPI1 Serial clock. Clock output from master or input to slave | Yellow |
| Pin # | Name | Type | Port | Description | Color |
|---|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black | |
| 2 | +5V | PWR | 5V Rail from autopilot | Orange | |
| 3 | +3.3V | PWR | 3.3V Rail from autopilot | Red | |
| 4 | AUX1 | I/O | PB1 | General Purpose I/O #1 or ADC_1 Input or PWM6 | |
| 5 | AUX2 | I/O | PC5 | General Purpose I/O #2 or ADC_2 Input | |
| 6 | AUX3 | I/O | PC4 | General Purpose I/O #3 or ADC_3 Input | |
| 7 | AUX4 | I/O | PB15 | General Purpose I/O #4 |
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | +3.3V | PWR | 3.3V Rail from autopilot | Red |
| 3 | RST | IN | MCU Reset | White |
| 4 | SWCLK | IN | Serial Wire Clock | Blue |
| 6 | SWDIO | I/O | Serial Wire Data Input/Output | Brown |
Schematic
soon...
Examples of Airborne Equipment Electrical Connections
Small Aircraft Connection Diagram
soon...
Large Aircraft Connection Diagram
soon...
PCB
Gerber & Drill Files
Assembly
Components Layout
Apogee v1.00 bottom components Layout
Apogee v1.00 top components Layout


Bill Of Material
PCB and assembled boards suppliers
Check availability on Get Hardware page
Mechanical Dimensions


Programming
Apogee autopilot can reprogrammed in two different ways:
- using the MCU native DFU USB bootloader over the on-board USB header (so pre-loading an "external" bootloader is useless)
- using the SWD (Serial Wire Debug) connector
Source code
Available in latest git master branch