Difference between revisions of "NavStik"
Jump to navigation
Jump to search

Fvantienen (talk | contribs) (Created page with "{| align=right |- |<categorytree style="float:right; clear:right; margin-left:1ex; border: 1px solid gray; padding: 0.7ex;" mode=pages>Autopilots</categorytree> |} <div style=...") |
Fvantienen (talk | contribs) |
||
| (3 intermediate revisions by the same user not shown) | |||
| Line 1: | Line 1: | ||
[[File:tudelft_logo.jpg|left|120px|link=http://mavlab.lr.tudelft.nl/en/]] | |||
{| align=right | {| align=right | ||
|- | |- | ||
| Line 7: | Line 9: | ||
= Overview = | = Overview = | ||
The NavStik autopilot comes from [http://www.navstik.org NavStik] | The NavStik autopilot comes from [http://www.navstik.org NavStik] and consists of a main board with several breakout boards. Until now we have 3 flavours in the breakout board, the IvyPRO, the IvyEZ and the IvyLITE. Each of these breakout boards have different specifications, but since the main board contains all the sensors they will never change. | ||
Next to the autopilot it has the capability to add a Gumstix Overo on top for more processing power. | Next to the autopilot it has the capability to add a Gumstix Overo on top for more processing power. | ||
== Key Features == | |||
The NavStik main board consists of the following main features: | |||
* 3-axis Accelerometer | |||
* 3-axis Gyroscope | |||
* 3-axis Magnetometer | |||
* Barometer (Static Pressure Sensor) | |||
* GPS (Optional) | |||
* Temperature Sensors for Temperature Compensation of Sensor Data | |||
* Cortex M4 Based Microcontroller (STM32F4: 32 bit, 168 MHz) | |||
* Onboard SPI Flash with 16 Mb Memory | |||
* Connectors for Interface Board (required for power and interface to external world) | |||
* Connectors for Gumstix Overo® (optional – available from Gumstix; for advanced applications) | |||
* Connector for GPS Antenna (optional; required for GPS applications) | |||
* Differential Pressure Sensor (optional; for air-speed estimation) | |||
* Power Regulators and Switches (for programmatically controlling power to different subsections) | |||
= Breakout Boards = | |||
Since the NavStik doesn't have any real connectors or power management you will need a breakout board for your autopilot to make it fully functional. | |||
In this section we will give you a short overview of the three different breakout boards. | |||
{| | |||
! style="text-align:left;"| Features | |||
! IvyPRO | |||
! IvyEZ | |||
! IvyLITE | |||
|- | |||
|PWM In/Out ||6 (0.1” Headers) + 6 (JST-SH Connector)|| 6 (0.1” Headers) + 6 (JST-SH Connector)|| 6 + 6 (All Pads)|| | |||
|- | |||
|Micro SD Card ||YES (Push-Push Type) || YES (Header Type) || YES (Header Type)|| | |||
|- | |||
|Port for Telemetry (UART)||YES (JST-SH)||YES (JST-SH)||YES (Pads)|| | |||
|- | |||
|NavStik USB Port(s) ||2 (Micro-USB, JST-SH) ||1 (Micro-USB) ||2 (Micro-USB, Pads)|| | |||
|- | |||
|Port for Spektrum (UART) ||YES (JST-SH) ||NO ||NO|| | |||
|- | |||
|Ports for Gumstix Overo® ||UART, USB (2)||NONE ||UART, USB|| | |||
|- | |||
|Debug Port (for IvyGS) ||YES ||YES* ||YES|| | |||
|- | |||
|Current Measurement ||YES ||NO ||NO|| | |||
|- | |||
|Battery Voltage Monitor ||YES ||YES ||NO|| | |||
|- | |||
|Input Voltage Range ||4.5V – 14.0V ||3.5V – 5.5V ||4.0V – 5.5V|| | |||
|- | |||
|ESD, Short-Circuit Protection ||YES ||YES ||YES|| | |||
|- | |||
|Auto Power Switching ||YES ||YES ||YES|| | |||
|- | |||
|Cost ||+++++ ||+++ ||+++|| | |||
|- | |||
|Size ||41mm x 35mm||41mm x 17mm||35mm x 17mm|| | |||
|- | |||
|Weight ||˜8.6 gram||˜5 gram||˜3.2 gram | |||
|} | |||
[[Category:Autopilots]] | [[Category:Autopilots]] | ||
Latest revision as of 04:56, 7 June 2014

Overview
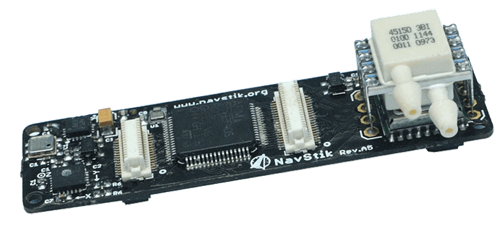
The NavStik autopilot comes from NavStik and consists of a main board with several breakout boards. Until now we have 3 flavours in the breakout board, the IvyPRO, the IvyEZ and the IvyLITE. Each of these breakout boards have different specifications, but since the main board contains all the sensors they will never change. Next to the autopilot it has the capability to add a Gumstix Overo on top for more processing power.
Key Features
The NavStik main board consists of the following main features:
- 3-axis Accelerometer
- 3-axis Gyroscope
- 3-axis Magnetometer
- Barometer (Static Pressure Sensor)
- GPS (Optional)
- Temperature Sensors for Temperature Compensation of Sensor Data
- Cortex M4 Based Microcontroller (STM32F4: 32 bit, 168 MHz)
- Onboard SPI Flash with 16 Mb Memory
- Connectors for Interface Board (required for power and interface to external world)
- Connectors for Gumstix Overo® (optional – available from Gumstix; for advanced applications)
- Connector for GPS Antenna (optional; required for GPS applications)
- Differential Pressure Sensor (optional; for air-speed estimation)
- Power Regulators and Switches (for programmatically controlling power to different subsections)
Breakout Boards
Since the NavStik doesn't have any real connectors or power management you will need a breakout board for your autopilot to make it fully functional. In this section we will give you a short overview of the three different breakout boards.
| Features | IvyPRO | IvyEZ | IvyLITE | |
|---|---|---|---|---|
| PWM In/Out | 6 (0.1” Headers) + 6 (JST-SH Connector) | 6 (0.1” Headers) + 6 (JST-SH Connector) | 6 + 6 (All Pads) | |
| Micro SD Card | YES (Push-Push Type) | YES (Header Type) | YES (Header Type) | |
| Port for Telemetry (UART) | YES (JST-SH) | YES (JST-SH) | YES (Pads) | |
| NavStik USB Port(s) | 2 (Micro-USB, JST-SH) | 1 (Micro-USB) | 2 (Micro-USB, Pads) | |
| Port for Spektrum (UART) | YES (JST-SH) | NO | NO | |
| Ports for Gumstix Overo® | UART, USB (2) | NONE | UART, USB | |
| Debug Port (for IvyGS) | YES | YES* | YES | |
| Current Measurement | YES | NO | NO | |
| Battery Voltage Monitor | YES | YES | NO | |
| Input Voltage Range | 4.5V – 14.0V | 3.5V – 5.5V | 4.0V – 5.5V | |
| ESD, Short-Circuit Protection | YES | YES | YES | |
| Auto Power Switching | YES | YES | YES | |
| Cost | +++++ | +++ | +++ | |
| Size | 41mm x 35mm | 41mm x 17mm | 35mm x 17mm | |
| Weight | ˜8.6 gram | ˜5 gram | ˜3.2 gram |