Difference between revisions of "Umarim Lite v2"
(fix image names) |
|||
| (3 intermediate revisions by one other user not shown) | |||
| Line 3: | Line 3: | ||
<div style="float: right; width: 35%">__TOC__</div> | <div style="float: right; width: 35%">__TOC__</div> | ||
Help needed for a new blah blah introduction... | <br> | ||
<br> | |||
'''''Help needed for a new blah blah introduction...''''' | |||
<br> | |||
<br> | |||
== Hardware Revision History == | == Hardware Revision History == | ||
| Line 37: | Line 41: | ||
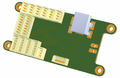
Image:UmarimLite_v2_3D_bottom.png|Umarim Lite v2 3D bottom view | Image:UmarimLite_v2_3D_bottom.png|Umarim Lite v2 3D bottom view | ||
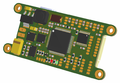
Image:UmarimLite_v2_3D_top.png|Umarim Lite v2 3D top view | Image:UmarimLite_v2_3D_top.png|Umarim Lite v2 3D top view | ||
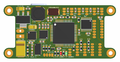
Image: | Image:UmarimLite_v2_2D_top.png|Umarim Lite v2 top side | ||
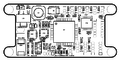
Image: | Image:UmarimLite_v2_2D_bottom.png|Umarim Lite v2 bottom side | ||
</gallery> | </gallery> | ||
| Line 192: | Line 196: | ||
== Schematic == | == Schematic == | ||
[[Image:UmarimLite_v2_Schematic.png|left|900px|Umarim | [[Image:UmarimLite_v2_Schematic.png|left|900px|Umarim Lite v2 Schematic]] | ||
<br style="clear:both"> | <br style="clear:both"> | ||
== Examples of Airborne Equipment Electrical Connections == | == Examples of Airborne Equipment Electrical Connections == | ||
| Line 339: | Line 342: | ||
== Mechanical Dimensions == | == Mechanical Dimensions == | ||
[[Image: | [[Image:UmarimLite_v2_top_mechanical_dimensions.png|500px|Umarim v2 Top Mechanical Dimensions]] | ||
[[Image:UmarimLite_v2_side_mechanical_dimensions.png|500px|Umarim v2 Side Mechanical Dimensions]] | |||
== Paparazzi USB Bootloader Upload == | == Paparazzi USB Bootloader Upload == | ||
Latest revision as of 03:26, 28 August 2013

Help needed for a new blah blah introduction...
Hardware Revision History
| Version # | Release Date | Release Notes |
|---|---|---|
| v2 | 07/2012 | Minor PCB modifications |
| v1 | 03/2012 | Initial release of Umarim Lite |
Features
- NXP LPC2148 MCU based
- 1 x Triple axis Digital Gyroscope (Invensense ITG-3200)
- 1 x Triple axis Digital Accelerometer (Analog Devices ADXL345)
- 6 x Servo PWM outputs
- 1 x R/C receiver PPM frame input
- 2 x UART (TTL 3.3V, 5V tolerant)
- 2 x I2C bus
- 1 x SPI bus
- 1 x USB (client)
- 4 x General Purpose I/O or Analog input channels (0V - 3.3V)
- 5v / 1.5A switching power supply (input voltage range 5.5V min → 17.0v max)
- 3.3v / 1A linear regulator
- 2 x status LEDs
- 8 grams (0,3 oz)
- 53 x 25mm (2.1" x 0.98")
- 4 layers PCB design / single side SMD components
Umarim Lite v2 3D bottom view
Umarim Lite v2 3D top view

Umarim Lite v2 top side
Umarim Lite v2 bottom side




Pinout
Pins Name and Type are specified with respect to the Autopilot Board

| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | +5V | PWR | 5V Rail from autopilot | Orange |
| 3 | SRVx | OUT | Servo signal (PWM) | White |
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | +5v | PWR | 5V Rail from autopilot | Orange |
| 3 | PPM_IN | IN | PPM Stream from R/C Receiver (5V tolerant) | White |
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | +3.3V | PWR | 3.3V Rail from autopilot | Red |
| 3 | SSEL1 | IN | SSP Slave Select. Selects the SSP interface as a slave (SSEL1) | Brown |
| 4 | MOSI1 | I/O | SPI1 Master Out Slave In. Data output from master / data input to slave | Grey |
| 5 | MISO1 | I/O | SPI1 Master In Slave Out. Data input to master / data output from slave | Green |
| 6 | DRDY1 | IN | External interrupt 0 input (EINT0) | Purple |
| 7 | SCK1 | I/O | SPI1 Serial clock. Clock output from master or input to slave | Yellow |
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | +5V | PWR | 5V Rail from autopilot | Orange |
| 3 | +3.3V | PWR | 3.3V Rail from autopilot | Red |
| 4 | AUX1 | I/O | General Purpose I/O #1 or ADC Input ADC_0 (lpc AD1.5) | |
| 5 | AUX2 | I/O | General Purpose I/O #2 or ADC Input ADC_1 (lpc AD1.4) | |
| 6 | AUX3 | I/O | General Purpose I/O #3 or ADC Input ADC_2 (lpc AD1.3) | |
| 7 | AUX4 | I/O | General Purpose I/O #4 or ADC Input ADC_3 (lpc AD1.2) |
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | +5V | PWR | 5V Rail from autopilot | Orange |
| 3 | +3.3V | PWR | 3.3V Rail from autopilot | Red |
| 4 | RXD0 | IN | UART0 Serial Input (3.3V level, 5V Tolerant) | Green |
| 5 | TXD0 | OUT | UART0 Serial Output (3.3V level) | Blue |
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | +5V | PWR | 5V Rail from autopilot | Orange |
| 3 | +3.3V | PWR | 3.3V Rail from autopilot | Red |
| 4 | RXD1 | IN | UART1 Serial Input (3.3V level, 5V Tolerant) | Green |
| 5 | TXD1 | OUT | UART1 Serial Output (3.3V level) | Blue |
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | +5V | PWR | 5V Rail from autopilot | Orange |
| 3 | +3.3V | PWR | 3.3V Rail from autopilot | Red |
| 4 | SDA0 | Open Drain I/O |
I2C0 bus Serial DAta | Brown |
| 5 | SCL0 | Open Drain I/O |
I2C0 bus Serial CLock | Blue |
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | +5V | PWR | 5V Rail from autopilot | Orange |
| 3 | +3.3V | PWR | 3.3V Rail from autopilot | Red |
| 4 | SDA1 BOOT |
Open Drain I/O |
I2C1 bus Serial DAta In-Circuit Serial Programming (ISP) enable (P0.14, +3.3v pullup) (Note) |
Brown |
| 5 | SCL1 | Open Drain I/O |
I2C1 bus Serial CLock | Blue |
Note: Holding this pin low for at least 3mS after a RESET (or power up) instructs the controller to enter programming mode.
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | USB+ | I/O | USB bidirectional D+ line | Green |
| 3 | USB- | I/O | USB bidirectional D- line | White |
| 4 | VBUS | IN | Indicates the presence of USB bus power (P0.23) (5V level) | Orange |
Note: MiniUSB and Molex USB connectors are in parallel, only one can be connected at a time.
Schematic

Examples of Airborne Equipment Electrical Connections
Small Aircraft Connection Diagram

Large Aircraft Connection Diagram

PCB
Gerber & Drill Files
PCB design Eurocircuits 6-C class compliant:
Download Umarim v2 gerber & drill files (zip)
RS274X, units = Inches, format = 2:5
- UmarimLite_v2_SILKSCREEN_TOP.GBR (Top Component Print Layer)
- UmarimLite_v2_SOLDERMASK_TOP.GBR (Top Solder Mask)
- UmarimLite_v2_SIGNAL_TOP.GBR (Top Copper Layer)
- UmarimLite_v2_INTERNAL_PLANE_1.GBR (Internal Copper Layer GND)
- UmarimLite_v2_INTERNAL_PLANE_2.GBR (Internal Copper Layer +3.3V)
- UmarimLite_v2_SIGNAL_BOTTOM.GBR (Bottom Copper Layer)
- UmarimLite_v2_SOLDERMASK_BOTTOM.GBR (Bottom Solder Mask)
- UmarimLite_v2_OUTLINE.GBR (Board Outline)
- UmarimLite_v2_DRILL.GBR (NC XY coordinates & Drill tools sizes)
Assembly
Components Layout
Umarim Lite v2 bottom components Layout
Umarim Lite v2 top components Layout
Umarim Lite v2 bottom components detail
Umarim Lite v2 top components detail


Bill Of Material
Download Umarim Lite v2 Bill of Material (zipped .xls file)
| Qty | Manufacturer part number |
Part name / value | Designator | Description | Manufacturer | Package type |
Digikey part number |
Other distributor | |
|---|---|---|---|---|---|---|---|---|---|
| Resistors | |||||||||
| 2 | ERJ-3EKF33R0V | 33R | R1,R2 | 33.0 Ohm 1/10W 1% | Panasonic - ECG | 0603 | P33.0HCT-ND | ||
| 1 | ERJ-3EKF1000V | 100R | R3 | 100 Ohm 1/10W 1% | Panasonic - ECG | 0603 | P100HCT-ND | ||
| 2 | ERJ-3EKF3900V | 390R | R4,R5 | 390 Ohm 1/10W 1% | Panasonic - ECG | 0603 | P390HCT-ND | ||
| 2 | ERJ-3EKF1501V | 1.5K | R6,R7 | 1.50K Ohm 1/10W 1% | Panasonic - ECG | 0603 | P1.50KHCT-ND | ||
| 1 | ERJ-3EKF1801V | 1.8K | R8 | 1.80K Ohm 1/10W 1% | Panasonic - ECG | 0603 | P1.80KHCT-ND | ||
| 4 | ERJ-3EKF2201V | 2.2k | R9 to R12 | 2.20K Ohm 1/10W 1% | Panasonic - ECG | 0603 | P2.20KHCT-ND | ||
| 1 | ERJ-3EKF3301V | 3.3K | R13 | 3.30K Ohm 1/10W 1% | Panasonic - ECG | 0603 | P3.30KHCT-ND | ||
| 2 | ERJ-3EKF1002V | 10K | R14,R15 | 10.0K Ohm 1/10W 1% | Panasonic - ECG | 0603 | P10.0KHCT-ND | ||
| Capacitors | |||||||||
| 2 | C1608C0G1H180J | 18p | C1,C2 | Ceramic 18pF 50V C0G 5% | TDK Corp. | 0603 | 445-1272-1-ND | ||
| 1 | C1608X7R1H222K | 2.2n/50V | C3 | Ceramic 2.2nF 50V X7R 10% | TDK Corp. | 0603 | 445-1309-1-ND | ||
| 1 | C1608X7R1H103K | 10n | C4 | Ceramic 10nF 50V X7R 10% | TDK Corp. | 0603 | 445-1311-1-ND | ||
| 17 | CC0603KRX7R8BB104 | 100n | C5 to C21 | Ceramic 0.1uF 25V X7R 10% | Yageo | 0603 | 311-1341-1-ND | ||
| 1 | C1608X5R1E105K | 1u/25V/X5R | C22 | Ceramic 1.0uF 25V X5R10% | TDK Corp. | 0603 | 445-5146-1-ND | ||
| 1 | C1608X5R0J106M | 10u/6.3V | C23 | Ceramic 10uF 6.3V X5R 20% | TDK Corp. | 0603 | 445-4112-1-ND | ||
| 2 | TAJA336K006RNJ | 33u/6.3v | C24,C25 | Tantalum 33uF 6.3V 10% | AVX Corp. | A case (EIA 3216-18) | 478-1666-1-ND | ||
| 1 | TR3D107K020C0080 | 100u/20V | C26 | Tantalum 100uF 20V 10% | Vishay/Sprague | D case (EIA 7343-31) | 718-1774-1-ND | ||
| Inductors | |||||||||
| 1 | B82462G4682M | 6.8u | L1 | 1.65A Power Inductor | Epcos Inc. | 6.0x6.0 mm | 495-1999-1-ND | ||
| Semiconductors | |||||||||
| 1 | LPC2148FBD64,151 | LPC2148FBD64 | IC1 | Single-chip ARM7 32-bit microcontroller | NXP Semicond. | LQFP64 | 568-1765-ND | ||
| 1 | ITG-3200 | ITG-3200 | IC2 | 3-Axis Digital-Output Gyroscope | InvenSense | QFN24 | N/A | Farnell(#1858279),Sparkfun(#SEN-09793) | |
| 1 | ADXL345BCCZ-RL | ADXL345 | IC3 | 3-Axis 16 g Digital Accelerometer | Analog Devices Inc. | LGA14 | ADXL345BCCZ-RLCT-ND | ||
| 1 | TPS62112RSAT | TPS62112 | IC4 | 17V, 1.5-A, Synchronous Step-Down Converter | Texas Instruments | QFN16 | 296-19717-1-ND | ||
| 1 | LM3940IMP-3.3/NOPB | LM3940IMP-3.3 | IC5 | 1A low dropout regulator for 5V to 3.3V conversion | National Semicond. | SOT223 | LM3940IMP-3.3CT-ND | ||
| 1 | CD4017BPWR | 4017 | IC6 | Decade Counter/Divider with 10 Decoded Outputs | Texas Instruments | TSSOP16 | 296-14252-1-ND | ||
| 1 | APT1608SURCK | KP-1608SURC | LED1 | SMD Chip Red LED Lamp | Kingbright Corp. | 0603 | 754-1123-1-ND | ||
| 1 | APT1608MGC | KP-1608MGC | LED2 | SMD Chip Green LED Lamp | Kingbright Corp. | 0603 | 754-1118-1-ND | ||
| 1 | DTA143ZE-TP | DTA143ZE | T1 | PNP Pre-Biased Small Signal Transistor | Micro Commercial Co. | SOT523 | DTA143ZE-TPMSCT-ND | ||
| Connectors | |||||||||
| 7 | 53047-0310 | SRV0 to 5, RC | J1 to J7 | Picoblade 3 pins 1.25mm straight header | Molex Inc. | - | WM1732-ND | ||
| 1 | 53047-0410 | USB | J8 | Picoblade 4 pins 1.25mm straight header | Molex Inc. | - | WM1733-ND | ||
| 4 | 53047-0510 | UART0-1,I2C0-1 | J9 to J12 | Picoblade 5 pins 1.25mm straight header | Molex Inc. | - | WM1734-ND | ||
| 2 | 53047-0710 | SPI1,AUX | J13,J14 | Picoblade 7 pins 1.25mm straight header | Molex Inc. | - | WM1736-ND | ||
| 1 | 67503-1020 | USB_REC | J16 | Mini USB Receptacle SMD | Molex Inc. | - | WM5461CT-ND | ||
| Other | |||||||||
| 1 | CX5032GB12000H0PESZZ | CX5032GB12000 | Q1 | CRYSTAL 12.0MHZ 12PF SMD | AVX Corp. | 5.0x3.2mm | 478-4359-1-ND | ||
PCB and assembled boards suppliers
Check availability on Get Hardware page
Mechanical Dimensions


Paparazzi USB Bootloader Upload
Required components
- 1 x FTDI TTL-232R-3V3 (Digikey #768-1015-ND) USB to UART converter cable with +3.3V TTL level UART signals. (see Note 1)
- 2 x 4-pin connector housing Molex Picoblade 51021-0400 (Digikey #WM1722-ND)
- 5 x crimp terminal female Molex Picoblade 50058-8000 (Digikey #WM1775CT-ND)
- 1 x 6-pin 0.1" pitch single in line male connector header Samtec TSW-132-07-TS (Digikey #SAM1035-32-ND) or equivalent
- 28-32AWG wiring cable
- Note1: It is advised to use FTDI USB-serial converter, as serial FTDI chips are by default working well in Linux.
- The Paparazzi ground station software is configured to look for modems on FTDI ports by default.
- This harness can also serve as a modem interface (after it's use in Bootloader uploading) if you plug it on Umarim's UART1 connector
Connection Diagram
Make up a wiring harness similar to the following

Boot Sequence
