Difference between revisions of "Yapa"
Jump to navigation
Jump to search
| Line 38: | Line 38: | ||
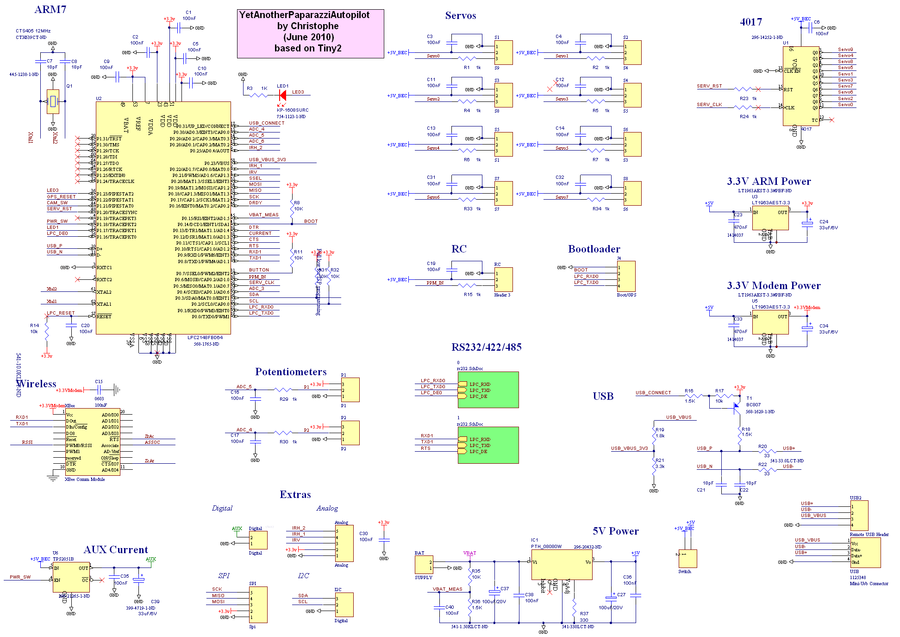
== Architecture == | == Architecture == | ||
[[Image:Yapa_v1-00_schematics.png]] | [[Image:Yapa_v1-00_schematics.png|left|900px|Yapa v1.0 Schematic]] | ||
== Files == | == Files == | ||
[[File:Yapa_gerber.png]] | [[File:Yapa_gerber.png]] | ||
Revision as of 06:43, 15 July 2010
"Yet Another Paparazzi Autopilot".
This autopilot was not designed to replace any other, but just as another version of the same and is posted here just in case it might be useful to anybody. The Yapa is very similar to the Twog_v1 but has standard 100mil headers for direct standard servo connections, and has the xbee on the board itself.

Rendering

Top side

Bottom side



Hardware Revision History
| Version # | Release Date | Release Notes |
|---|---|---|
| v1.00 | 07/2010 | Initial release of Yapa v1 |
Features
- Basic Design very similar to Twog_v1 (uses same autopilot configuration file 'tiny2_1_1.h')
- 100mil headers instead of the (nice and lighter) Molex connectors
- Support Holes (e.g. use M3 bobbins: [1])
- 5 x Analog inputs with 2 of them low pass filtered
- 0-2x RS232/RS422/RS485/3.3TLL serial ports for connecting virtually any serial device
- Onboard (optional) Xbee Modem
- 8 x PWM outputs on standard 1/10th inch headers
- 1 x R/C receiver PPM frame input
- 1 x SPI bus
- 1 x I2C bus
- 1 x USB (client) with either onboard mini-usb AND/OR remotely located USB Plug
- 5v / 2.25A switching power supply (input voltage range 6.1v → 18v) OR 5V power from the ESC connected to the servo plugs
- 2x 3.3v / 1A linear regulator for Processor and for XBee modem separated
- 1 x status LEDs with attached test point
- 80.0 x 40.0mm
- 1 power switch with current limiter
- 2 layers PCB design, 0603 components
Architecture

{kind=link}