Difference between revisions of "Lisa/S"
Jump to navigation
Jump to search

Karlito139 (talk | contribs) |
Karlito139 (talk | contribs) |
||
| Line 52: | Line 52: | ||
{{Box Code|conf/airframes/myplane.xml| | {{Box Code|conf/airframes/myplane.xml| | ||
<source lang="xml"> | |||
<firmware name="fixedwing"> | <firmware name="fixedwing"> | ||
<target name="ap" board="lisa_s_0.1"> | <target name="ap" board="lisa_s_0.1"> | ||
| Line 62: | Line 63: | ||
... | ... | ||
</firmware> | </firmware> | ||
</source> | |||
}} | }} | ||
| Line 67: | Line 69: | ||
{{Box Code|conf/airframes/myplane.xml| | {{Box Code|conf/airframes/myplane.xml| | ||
<source lang="xml"> | |||
... | ... | ||
<modules> | <modules> | ||
| Line 74: | Line 77: | ||
</modules> | </modules> | ||
... | ... | ||
</source> | |||
}} | }} | ||
Revision as of 09:33, 2 April 2014

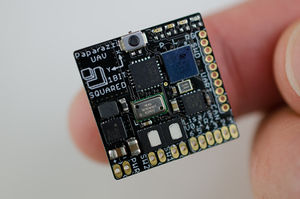
Lisa/S
Lisa/S is a very small general purpose autopilot. The main goal of creating an autopilot of minimal size and weight, while providing a lot of functionality is achieved:
- Size: 20mm x 20mm x 5mm (0.787" x 0.787" x 0.197")
- Weight: 2.8g (0.1oz)
Features
- 72MHz 32bit ARM Cortex M3 MCU with 16KB RAM and 512KB Flash
- Combined 3 Axis Gyroscope and 3 Axis Accelerometer
- 3 Axis Magnetometer
- Barometer (Altimeter)
- Onboard U-Blox GPS
- Pads to simply connect a Superbit CYRF RC and telemetry module
- Switching buck/boost converter allowing wide range of power input making it perfect and stable for operation from a 1S LiPO cell.
- 2 MOSFET switches connected to PWM output channels
- 6 PWM (servo) outputs
- 1 debug UART port
- 1 CAN interface
- 1 Bind/Boot tact switch
- SWD programming/debugging interface
- Size: 20mm x 20mm x 5mm (0.787" x 0.787" x 0.197")
- Weight: 2.8g (0.1oz)
Pictures




So if you are ready to make your tiny plane fly autonomously,you can already order one here
Pinout
TODO
Block Diagrams
TODO
Barometer
In order to use the barometer, you just need to add two lines to your firmware block (in your airframe file) :
| File: conf/airframes/myplane.xml |
<firmware name="fixedwing">
<target name="ap" board="lisa_s_0.1">
...
<configure name="LISA_S_BARO" value="BARO_MS5611_SPI"/>
...
</target>
...
<define name="USE_BAROMETER" value="TRUE"/>
...
</firmware>
|
Then you just need to load the associated module (still in your airframe file :
| File: conf/airframes/myplane.xml |
...
<modules>
...
<load name="baro_ms5611_spi.xml"/>
...
</modules>
...
|
Once thoses 3 lines are added to the airframe file, you should be able to get the values of the barometer and paparazzi is going to take them into account when doing it's calculations.
Schematics

Availability
![]()
As of 2013-11-27 Lisa/S is available for pre-order from 1 BIT SQUARED.