Difference between revisions of "AspirinIMU"
IHaveADrone (talk | contribs) (→Downloads: fixed github link) |
|||
| (36 intermediate revisions by 6 users not shown) | |||
| Line 1: | Line 1: | ||
<div style="float: right; width: 45%; overflow: hidden">[[Image:Aspirin_2.1_imu_front.jpg|right|200px|Aspirin V2.1 top view]]</div> | |||
[[Image: | __TOC__ | ||
== Aspirin IMU == | == Aspirin IMU == | ||
The next generation flat | The next generation flat multi degree of freedom inertial measurement unit. It uses digital 3-axis sensors which allow for a very small size and price. Other features include onboard voltage regulators, EEPROM for storing calibration data and extra sensors such as a barometer. | ||
== Hardware Revision History == | |||
{|border="1" cellspacing="0" style="text-align:center" cellpadding="6" | |||
!''Version #''!!''Release Date''!!''Release Notes'' | |||
|- | |||
|v2.2(current)||09/2012||2nd Gen Revision | |||
|- | |||
|v2.1r1||08/2012||2nd Gen Minor Revision | |||
|- | |||
|v2.1||03/2012||2nd Gen Production Release | |||
|- | |||
|v2.0||11/2011||2nd Gen Prototype | |||
|- | |||
|v1.5||04/2011||Updated Production Release | |||
|- | |||
|v1.4||03/2011||Prototype Update | |||
|- | |||
|v1.3||08/2010||Initial Production Release | |||
|- | |||
|v1.2||07/2010||Prototype Update | |||
|- | |||
|v1.1||07/2010||Prototype Update | |||
|- | |||
|v1.0||07/2010||Initial Prototype | |||
|} | |||
== Features == | |||
* 3-axis accelerometer | |||
* 3-axis gyroscope | |||
* 3-axis magnetometer | |||
* Onboard voltage regulation | |||
* Onboard I2C EEPROM | |||
* Onboard barometer (''v2.1'') | |||
* Standard footprint across versions | |||
* Single PCB flat form-factor | |||
* Fits directly onto [[Lisa/M]], carriers for [[Booz]] and [[Lisa/L]], or for [[Autopilots|LPC21xx]] integration | |||
{|border="1" cellspacing="0" style="text-align:center" cellpadding="2%" width="70%" | |||
|+'''Aspirin Feature Matrix''' | |||
!width="6%"|''Version''!!width="10%"|''Accelerometer''!!width="10%"|''Gyroscope''!!width="10%"|''Magnetometer''!!width="10%"|''Barometer''!!width="15%"|''Regulators''!!width="10%"|''EEPROM''!!''Comments'' | |||
|- | |||
|v2.2||MPU-6000||MPU-6000||HMC5883||MS5611||1x 3.3V (LP2992)||yes||MS5611 is connected directly to the SPI bus | |||
|- | |||
|v2.1||MPU-6000||MPU-6000||HMC5883||MS5611||1x 3.3V (LP2992)||yes||MS5611 is connected to the aux I2C of the MPU6000 | |||
|- | |||
|v2.0||MPU-6000||MPU-6000||HMC5883||none||1x 3.3V (LP2992)||yes|| | |||
|- | |||
|v1.5||ADXL345||IMU-3000||HMC5883||none||2x 3.3V (LP2992)||yes|| | |||
|- | |||
|v1.4||ADXL345||IMU-3000||HMC5883||none||2x 3.3V (LP2992)||yes|| | |||
|- | |||
|v1.3||ADXL345||ITG-3200||HMC5843||none||2x 3.3V (LP2992)||yes|| | |||
|- | |||
|v1.2||ADXL345||ITG-3200||HMC5843||none||2x 3.3V (LP2992)||yes|| | |||
|- | |||
|v1.1||ADXL345||ITG-3200||HMC5843||none||2x 3.3V (LP2992)||yes|| | |||
|- | |||
|v1.0||ADXL345||ITG-3200||HMC5843||none||2x 3.3V (LP2992)||yes||Also has SC18IS600 SPI-I2C interface | |||
|} | |||
'''Note:''' Aspirin 2.1 comes in several population versions. The current version available at http://transition-robotics.com has the MPU-6000, HMC5843, and MS5611-01BA03 mounted. You can find the list of fitted sensors on Aspirin 2.1 in the eeprom block 4. | |||
<gallery widths=170px heights=120px> | |||
Image:Aspirin imu front.jpg|Aspirin V1.3 IMU front | |||
<!--Image:Aspirin imu front with scale.jpg|Aspirin IMU front with scale--> | |||
Image:Aspirin imu back.jpg|Aspirin V1.3 IMU back | |||
Image:Aspirin imu on carrier.JPG|Aspirin V1.3 IMU on [[Lisa/L]] compatible carrier board | |||
Image:LisaL_Aspirin_Flat_Carrier.jpg|Aspirin flat carrier board for [[Lisa/L]] (without IMU mounted) | |||
</gallery> | |||
== Support == | <gallery widths=220px heights=150px> | ||
Image:Aspirin_2.1_bottom.jpg|Aspirin IMU 2.1 bottom side | |||
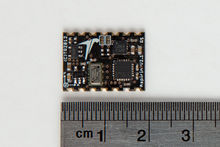
Image:Aspirin_2.1_top.jpg|Aspirin IMU 2.1 top side | |||
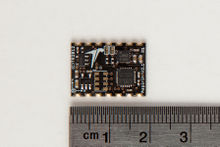
Image:Aspirin_2.1_nobaro_top.jpg|Aspirin IMU 2.1 top side no barometer mounted | |||
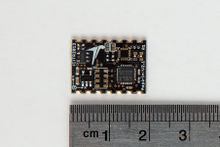
Image:Aspirin_2.1_nomag_nobaro_top.jpg|Aspirin IMU 2.1 top side no barometer and no magnetometer mounted | |||
</gallery> | |||
== Pinout == | |||
Note that Aspirin uses a standard footprint and pinout across all versions, with certain exceptions. The chip select (CS) and interrupt (Int) pins are not always assigned to the same devices. A good example is with the introduction of the MPU-6000 device. Check the schematics for details. | |||
'''Warning:''' When mounting Aspirin on Lisa/M note that the pin labeled GND on Aspirin (in the right upper corner on the following picture) is connected on Lisa/M to GYRO_SS. To prevent a software error induced shorting of the Lisa/M GYRO_SS pin to ground, remove the castellation or remove the connection on that pad. | |||
In the v2.1r1 versions of Aspirin ("R1" silkscreened onto PCB) the right upper GND pad was changed to Not Connected, (marked RESV in the below image), resolving the issue. | |||
[[Image:Aspirin IMU documented.jpg|300px|Aspirin IMU with documented IO connections.]] | |||
[[Image:Aspirin_booz_carrier_legend.jpg|300px|Aspirin IMU on booz/breakout carrier with documented IO connections.]] | |||
[[Image:Aspirin_flat_carrier_legend.jpg|300px|Aspirin IMU on flat carrier with documented IO connections.]] | |||
Note that the 12-pin connector pinout of the Booz/breakout carrier (center) is reversed with respect to the Lisa/L flat carrier (right). This is because the Booz carrier mounts to Lisa/L with the Aspirin underneath the carrier (e.g., Z axis pointing toward Lisa/L), and the flat carrier mounts to Lisa/L with the Aspirin on top (e.g., Z axis pointing away from Lisa/L). | |||
=== Breakout board === | |||
In case you have some Aspirin lying around and you want to use the on a non Lisa Board, like the TWOG, here pictures of how to patch the breakoutboard. Then connect to TWOG and add the correct defines to your airframe configuration document. | |||
<gallery> | |||
Image:Aspirin_v1.5_via_AsCa_v1.0_to_TWOG_03.jpg |Aspirin v1.5 via AsCa v1.0 to TWOG | |||
Image:Aspirin_v1.5_via_confboard_to_TWOG_01.jpg |Aspirin v1.5 via confboard to TWOG | |||
Image:Aspirin_v1.5_via_confboard_to_TWOG_02.jpg |Aspirin v1.5 via confboard to TWOG bottom | |||
Image:Aspirin_v1.5_via_Patching_the_Breakout_Board.jpg |Aspirin v1.5 via Patching the Breakout Board | |||
Image:Aspirin_v1.5_Connector_To_TWOG_Board.jpg |Aspirin v1.5 Connector To TWOG Board | |||
</gallery> | |||
== Block Diagrams == | |||
<gallery widths=300px heights=300px> | |||
Image:Aspirin-1_x-stm32-block_diagram.png|Aspirin 1.x to STM32 protocol connections | |||
Image:Aspirin-2_x-stm32-slave_i2c-block_diagram.png|Aspirin 2.x to STM32 default protocol connections (MPU-6000 slave I2C) | |||
Image:Aspirin-2_x-stm32-direct_i2c-block_diagram.png|Aspirin 2.x to STM32 alternative protocol connections (STM32 direct I2C) | |||
</gallery> | |||
== Schematics == | |||
Schematics are available under {{CC-BY-SA-3.0}} license. For additional intermediate schematics see [[AspirinIMU#Downloads|Downloads]]. | |||
<gallery widths=200px heights=137px> | |||
Image:Aspirin_imu_schematic_V1_3.png|Aspirin IMU V1.3 schematic | |||
Image:Aspirin_imu_schematic_V1_5.png|Aspirin IMU V1.5 schematic | |||
Image:Aspirin_imu_schematic_V2_1.png|Aspirin IMU V2.1 schematic | |||
Image:Aspirin_imu_schematic_V2_2.png|Aspirin IMU V2.2 schematic | |||
</gallery> | |||
== Drivers and Support == | |||
Please see the [[Subsystem/imu|IMU subsystem]] page for details on configuring Paparazzi for using an Aspirin IMU. | |||
The drivers for this IMU are available in the [https://github.com/paparazzi/paparazzi/blob/master/sw/airborne/subsystems/imu/imu_aspirin.c Paparazzi GitHub repository]. | The drivers for this IMU are available in the [https://github.com/paparazzi/paparazzi/blob/master/sw/airborne/subsystems/imu/imu_aspirin.c Paparazzi GitHub repository]. | ||
== | == PCB and assembled boards suppliers == | ||
Aspirin IMU is available in the [http://thequadshot.com/collections/all Transition Robotics/Quadshot Online Shop]. | |||
There are three options of Aspirin IMU: | |||
* [http://thequadshot.com/products/aspirin-imu Without a carrier board] | |||
* [http://thequadshot.com/products/aspirin-imu With Booz carrier board] | |||
* [http://thequadshot.com/products/aspirin-imu With next generation flat carrier board] | |||
** [http://thequadshot.com/products/lisa-l-aspirin-flat-carrier The flat carrier board can be purchased separately as well] | |||
== Mechanical Dimensions == | |||
[[Image:Aspirin_top_mechanical.png|500px|Aspirin Footprint Mechanical Dimensions]] | |||
The overall height of the board is about 3mm. | |||
== | == Downloads == | ||
'''Source files''' | |||
:*download available on GitHub: ''[https://github.com/paparazzi/paparazzi-hardware/tree/master/sensors/imu/aspirin Aspirin IMU and Carrier Board Cadsoft Eagle 6 Design]'' | |||
'''Gerber & Drill files''' | |||
:*download ''NOT YET AVAILABLE'' Need generated gerbers and drill files | |||
'''Assembly files''' | |||
:*download ''NOT YET AVAILABLE'' Need Aspirin Components layouts (pdf) | |||
:*download ''NOT YET AVAILABLE'' Need Aspirin Bill Of Material | |||
[[Category:Hardware]] [[Category:User_Documentation]] | |||
Latest revision as of 09:58, 11 July 2017

Aspirin IMU
The next generation flat multi degree of freedom inertial measurement unit. It uses digital 3-axis sensors which allow for a very small size and price. Other features include onboard voltage regulators, EEPROM for storing calibration data and extra sensors such as a barometer.
Hardware Revision History
| Version # | Release Date | Release Notes |
|---|---|---|
| v2.2(current) | 09/2012 | 2nd Gen Revision |
| v2.1r1 | 08/2012 | 2nd Gen Minor Revision |
| v2.1 | 03/2012 | 2nd Gen Production Release |
| v2.0 | 11/2011 | 2nd Gen Prototype |
| v1.5 | 04/2011 | Updated Production Release |
| v1.4 | 03/2011 | Prototype Update |
| v1.3 | 08/2010 | Initial Production Release |
| v1.2 | 07/2010 | Prototype Update |
| v1.1 | 07/2010 | Prototype Update |
| v1.0 | 07/2010 | Initial Prototype |
Features
- 3-axis accelerometer
- 3-axis gyroscope
- 3-axis magnetometer
- Onboard voltage regulation
- Onboard I2C EEPROM
- Onboard barometer (v2.1)
- Standard footprint across versions
- Single PCB flat form-factor
- Fits directly onto Lisa/M, carriers for Booz and Lisa/L, or for LPC21xx integration
| Version | Accelerometer | Gyroscope | Magnetometer | Barometer | Regulators | EEPROM | Comments |
|---|---|---|---|---|---|---|---|
| v2.2 | MPU-6000 | MPU-6000 | HMC5883 | MS5611 | 1x 3.3V (LP2992) | yes | MS5611 is connected directly to the SPI bus |
| v2.1 | MPU-6000 | MPU-6000 | HMC5883 | MS5611 | 1x 3.3V (LP2992) | yes | MS5611 is connected to the aux I2C of the MPU6000 |
| v2.0 | MPU-6000 | MPU-6000 | HMC5883 | none | 1x 3.3V (LP2992) | yes | |
| v1.5 | ADXL345 | IMU-3000 | HMC5883 | none | 2x 3.3V (LP2992) | yes | |
| v1.4 | ADXL345 | IMU-3000 | HMC5883 | none | 2x 3.3V (LP2992) | yes | |
| v1.3 | ADXL345 | ITG-3200 | HMC5843 | none | 2x 3.3V (LP2992) | yes | |
| v1.2 | ADXL345 | ITG-3200 | HMC5843 | none | 2x 3.3V (LP2992) | yes | |
| v1.1 | ADXL345 | ITG-3200 | HMC5843 | none | 2x 3.3V (LP2992) | yes | |
| v1.0 | ADXL345 | ITG-3200 | HMC5843 | none | 2x 3.3V (LP2992) | yes | Also has SC18IS600 SPI-I2C interface |
Note: Aspirin 2.1 comes in several population versions. The current version available at http://transition-robotics.com has the MPU-6000, HMC5843, and MS5611-01BA03 mounted. You can find the list of fitted sensors on Aspirin 2.1 in the eeprom block 4.

Aspirin V1.3 IMU front
Aspirin V1.3 IMU back

Aspirin V1.3 IMU on Lisa/L compatible carrier board

Aspirin flat carrier board for Lisa/L (without IMU mounted)





Aspirin IMU 2.1 bottom side
Aspirin IMU 2.1 top side
Aspirin IMU 2.1 top side no barometer mounted
Aspirin IMU 2.1 top side no barometer and no magnetometer mounted




Pinout
Note that Aspirin uses a standard footprint and pinout across all versions, with certain exceptions. The chip select (CS) and interrupt (Int) pins are not always assigned to the same devices. A good example is with the introduction of the MPU-6000 device. Check the schematics for details.
Warning: When mounting Aspirin on Lisa/M note that the pin labeled GND on Aspirin (in the right upper corner on the following picture) is connected on Lisa/M to GYRO_SS. To prevent a software error induced shorting of the Lisa/M GYRO_SS pin to ground, remove the castellation or remove the connection on that pad.
In the v2.1r1 versions of Aspirin ("R1" silkscreened onto PCB) the right upper GND pad was changed to Not Connected, (marked RESV in the below image), resolving the issue.



Note that the 12-pin connector pinout of the Booz/breakout carrier (center) is reversed with respect to the Lisa/L flat carrier (right). This is because the Booz carrier mounts to Lisa/L with the Aspirin underneath the carrier (e.g., Z axis pointing toward Lisa/L), and the flat carrier mounts to Lisa/L with the Aspirin on top (e.g., Z axis pointing away from Lisa/L).
Breakout board
In case you have some Aspirin lying around and you want to use the on a non Lisa Board, like the TWOG, here pictures of how to patch the breakoutboard. Then connect to TWOG and add the correct defines to your airframe configuration document.

Aspirin v1.5 via AsCa v1.0 to TWOG

Aspirin v1.5 via confboard to TWOG

Aspirin v1.5 via confboard to TWOG bottom

Aspirin v1.5 via Patching the Breakout Board

Aspirin v1.5 Connector To TWOG Board





Block Diagrams
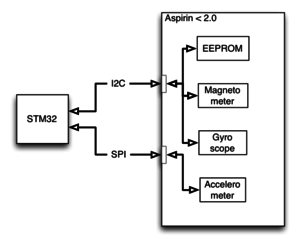
Aspirin 1.x to STM32 protocol connections
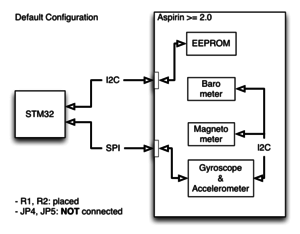
Aspirin 2.x to STM32 default protocol connections (MPU-6000 slave I2C)
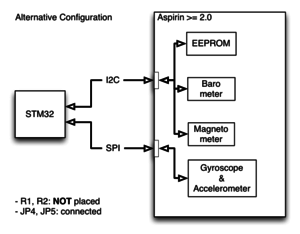
Aspirin 2.x to STM32 alternative protocol connections (STM32 direct I2C)



Schematics
Schematics are available under ![]() license. For additional intermediate schematics see Downloads.
license. For additional intermediate schematics see Downloads.
Aspirin IMU V1.3 schematic
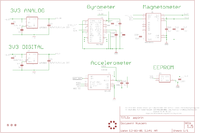
Aspirin IMU V1.5 schematic
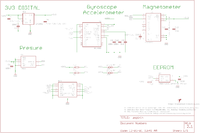
Aspirin IMU V2.1 schematic
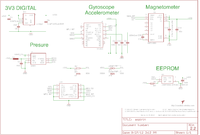
Aspirin IMU V2.2 schematic




Drivers and Support
Please see the IMU subsystem page for details on configuring Paparazzi for using an Aspirin IMU.
The drivers for this IMU are available in the Paparazzi GitHub repository.
PCB and assembled boards suppliers
Aspirin IMU is available in the Transition Robotics/Quadshot Online Shop.
There are three options of Aspirin IMU:
Mechanical Dimensions

The overall height of the board is about 3mm.
Downloads
Source files
- download available on GitHub: Aspirin IMU and Carrier Board Cadsoft Eagle 6 Design
Gerber & Drill files
- download NOT YET AVAILABLE Need generated gerbers and drill files
Assembly files
- download NOT YET AVAILABLE Need Aspirin Components layouts (pdf)
- download NOT YET AVAILABLE Need Aspirin Bill Of Material