Difference between revisions of "Lisa/S"
Jump to navigation
Jump to search
(Created page with "300px|right __TOC__ == Lisa/S == Lisa/S is a micro footprint general purpose autopilot. The main goal is size and weight, while providin…") |
|||
| Line 9: | Line 9: | ||
=== Features === | === Features === | ||
* 32bit ARM Cortex M3 MCU | * 72MHz 32bit ARM Cortex M3 MCU with 16Kb RAM and 512Kb Flash | ||
* Combined 3 Axis Gyroscope and 3 Axis Accelerometer | * Combined 3 Axis Gyroscope and 3 Axis Accelerometer | ||
* 3 Axis Magnetometer | * 3 Axis Magnetometer | ||
Revision as of 18:26, 2 August 2013

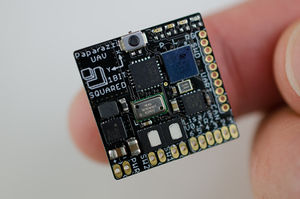
Lisa/S
Lisa/S is a micro footprint general purpose autopilot. The main goal is size and weight, while providing a lot of functionality.
Features
- 72MHz 32bit ARM Cortex M3 MCU with 16Kb RAM and 512Kb Flash
- Combined 3 Axis Gyroscope and 3 Axis Accelerometer
- 3 Axis Magnetometer
- Barometer (Altimeter)
- U-Blox GPS
- Pads for Superbit CYRF module
- Switching buck/boost converter allowing wide range of power input making it perfect and stable for operation from a 1S LiPO cell.
- 2 MOSFET switches connected to PWM output channels
- 6 PWM outputs
- 1 debug UART port
- 1 CAN interface
- 1 Bind/Boot tact switch
- SWD programming/debugging interface
- Size: 20mm x 20mm x 5mm
- Weight: ~2g (need a more accurate scale Esden 00:14, 3 August 2013 (UTC))
Pictures


Pinout
TODO
Block Diagrams
TODO
Schematics
TODO