|
|
| Line 1: |
Line 1: |
| [[Image:ir_sensor_bot_small.jpg|thumb|Paparazzi x-y IR sensor board]]
| | __NOTOC__ |
| The paparazzi autopilot uses infrared thermopiles for primary attitude sensing. The theory is that at zero bank or pitch angle, the difference in the heat between the two sensors should be zero, and at 90 degrees it should be maximum. From this relationship a linear regression is made and angles are calculated during flight. Each pair of sensors measures one axis, a minimum of 2 pairs must be used to measure pitch and roll but best results are obtained thru the use of a 3<sup>rd</sup> pair on the vertical axis. Since the output signal from each sensor pair is proportional to both the attitude and the weather/terrain, systems with only x-y sensors require a ground calibration and may not provide accurate angle calculations as the aircraft travels over terrain with different IR radiation.
| | __NOEDITSECTION__ |
|
| |
|
| === Architecture === | | {|style="border-spacing:8px;margin:0px -8px" class="MainPageBG" style="width:100%;border:1px solid #9999bf;background-color:#f5fffa;vertical-align:top;color:#000; text-align: left;" |
| | |-valign="top" |
| | | |
| | <h3 style="-moz-border-radius-topright: 1em;-moz-border-radius-topleft: 1em; |
| | background:#cedff2;margin:-2px;padding:4px;"> |
| | [[Image:favicon32.png|32px]] Infrared Sensors |
| | </h3> |
| | <div style="padding:6px;"> |
| | {{Infrared_Sensors}} |
| | </div> |
| | <!-- Start of right-column --> |
| | | class="MainPageBG" style="width:70%;border:1px solid #cedff2;background-color:#f5fffa;vertical-align:top"| |
| | {|width="100%" cellpadding="2" cellspacing="5" style="vertical-align:top;background-color:#f5fffa" |
| | |-valign="top" |
| | | <h2 style="margin:0;background-color:#cef2e0;font-size:120%;font-weight:bold;border:1px solid #a3bfb1;text-align:left;color:#000;padding:0.2em 0.4em;">Hardware support for previous, currently in use and future infrared boards.</h2> |
| | |- |
| | |[[Image:ir_sensor_bot_small.jpg|Paparazzi x-y IR sensor board]] |
| | |} |
| | |} |
|
| |
|
| [[Image:IR_Sensor_Board_Architecture.jpg]]
| | == Infrared Stabilisation Principle == |
| | The paparazzi autopilot uses infrared thermopiles for primary attitude sensing. The theory is that at zero bank or pitch angle, the difference in the heat between the two sensors should be zero, and at 90 degrees it should be maximum. From this relationship a linear regression is made and angles are calculated during flight. |
|
| |
|
| === Dual Axis Board Pinout ===
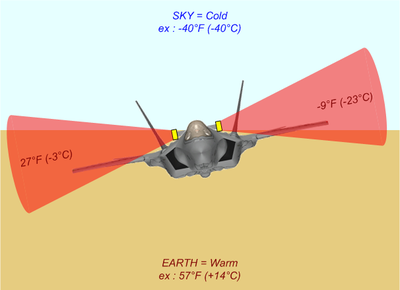
| | [[Image:Infrared_Stabilisation_Principle_tilted.png|400px|Two axis infrared attitude measurement]] |
|
| |
|
| [[Image:IR_Sensor_2-Axis_Pinout.jpg|frame|left|Component Side View]]
| | Each pair of sensors measures one axis, a minimum of 2 pairs must be used to measure pitch and roll but best results are obtained thru the use of a 3<sup>rd</sup> pair on the vertical axis. Since the output signal from each sensor pair is proportional to both the attitude and the weather/terrain, systems with only x-y sensors require a ground calibration and may not provide accurate angle calculations as the aircraft travels over terrain with different IR radiation. |
|
| |
|
| {| border="1" cellspacing="0" style="text-align:center" cellpadding="6"
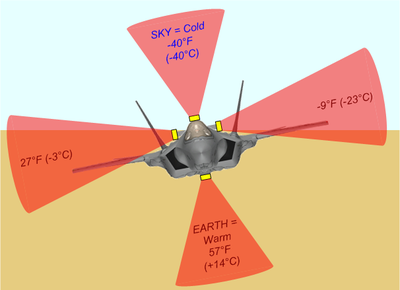
| | [[Image:Infrared_Stabilisation_Principle_tilted_with_Z.png|400px|Three axis infrared attitude measurement]] |
| !''Pin #''!!''Name''!!''Notes''!!width="50"|''Suggested Color''
| |
| |-
| |
| |1|||IR2||IR Signal Output Axis 2||style="background:grey; color:white"|Grey
| |
| |-
| |
| |2||GND||Ground||style="background:black; color:white"|Black
| |
| |-
| |
| |3||VCC|| +3.3v Power Supply||style="background:red; color:white"|Red
| |
| |- | |
| |4||IR1||IR Signal Output Axis 1||style="background:sienna; color:white"|Braun
| |
| |}
| |
| <br style="clear:both">
| |
|
| |
|
| === Single Axis Board Pinout === | | == Hardware Architecture == |
|
| |
|
| [[Image:IR_Sensor_1-Axis_Pinout.jpg|frame|left|Component Side View]]
| | === Horizontal Board === |
|
| |
|
| {| border="1" cellspacing="0" style="text-align:center" cellpadding="6"
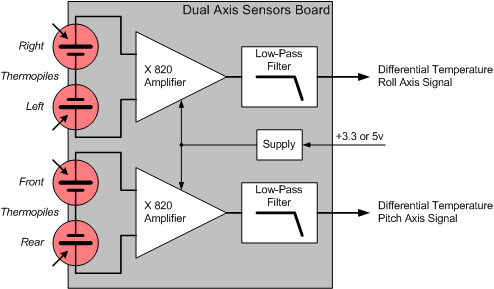
| | [[Image:IR_Sensor_Board_Architecture_dual.jpg]] |
| !''Pin #''!!''Name''!!''Notes''!!width="50"|''Suggested Color''
| |
| |-
| |
| |1||IR||IR Signal Output||style="background:purple; color:white"|Purple
| |
| |-
| |
| |2||VCC|| +3.3v Power Supply||style="background:red; color:white"|Red
| |
| |-
| |
| |3||GND||Ground||style="background:black; color:white"|Black
| |
| |-
| |
| |}
| |
| <br style="clear:both">
| |
|
| |
|
| [[Image:P_24.jpg]]
| | === Vertical Board === |
|
| |
|
| Below is a product designed by [http://www.fmadirect.com FMA Direct] and is a replacement for their Flight Stabilization system. With a simple resistor swap, this module is suitable for use in the Paparazzi UAV.
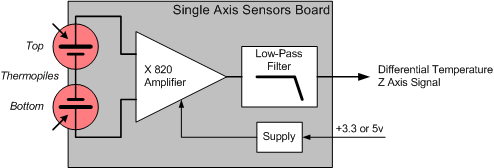
| | [[Image:IR_Sensor_Board_Architecture_single.jpg]] |
|
| |
|
| [http://www.fmadirect.com/detail.htm?item=1778§ion=20 CPD4SENUNIT]
| |
|
| |
|
| === Parts === | | == Thermopiles == |
|
| |
|
| The Thermopiles are: | | The Thermopiles are: |
| Line 52: |
Line 49: |
|
| |
|
| Description: IC SENS THERMOPILE W/THERM TO-39 | | Description: IC SENS THERMOPILE W/THERM TO-39 |
|
| |
| === FMA Direct CoPilot Sensor Head ===
| |
|
| |
| [[Image:fmairsensor.jpg]]
| |
|
| |
| {|
| |
| |[[Image:FMA_IR_OPAMP_OVR.jpg|thumb|left|300px|IR Sensor Board Bottom]]
| |
| |[[Image:FMA_IR_TOP_OVR.jpg|thumb|left|290px|IR Sensor Board Top]]
| |
| |}
| |
|
| |
| '''Stock FMA Components'''
| |
|
| |
| The stock FMA resistors R2/R3 and R5/R6 (0603 0.8 Mohm/0603 510 ohm) set the op amp gain to approximately 1600. Since this unit is designed to run on 5V and we are running it on 3.3V, it is advised to change R3 and R6 from 510 ohm to 1K ohm for an approximate gain of approximately 800. Without the change, it is theoretically possible to overdrive the Op Amp in extreme hot regions/seasons.
| |
|
| |
| Another resistor swap option for this board is to replace R2 and R5 with 560 Kohm resistors, generating an output gain of approximately 1100; a gain which is practically identical to that of the Paparazzi board.
| |
|
| |
| ''a suitable resistor from mouser is [http://www.mouser.com/search/productdetail.aspx?R=RK73H1JTTD5623Fvirtualkey66000000virtualkey660-RK73H1JTTD5623F here]''
| |
|
| |
| {|
| |
| |R1
| |
| |200 ohm
| |
| |-
| |
| |R2
| |
| |0.8 Mohm
| |
| |-
| |
| |R3
| |
| |510 ohm
| |
| |-
| |
| |R4
| |
| |200 ohm
| |
| |-
| |
| |R5
| |
| |0.8 Mohm
| |
| |-
| |
| |R6
| |
| |510 ohm
| |
| |-
| |
| |R7
| |
| |600 ohm
| |
| |-
| |
| |R8
| |
| |600 ohm
| |
| |-
| |
| |C1
| |
| |0.026 uF
| |
| |-
| |
| |C2
| |
| |0.026 uF
| |
| |-
| |
| |C3
| |
| |0.026 uF
| |
| |-
| |
| |C4
| |
| |0.026 uF
| |
| |-
| |
| |C5
| |
| |0.01 uF
| |
| |-
| |
| |C6
| |
| |0.026 uF
| |
| |}
| |
|
| |
| === FMA Direct Vertical Sensor ===
| |
|
| |
| [[Image:fmavertsensor.gif]]
| |
|
| |
| {|
| |
| |[[Image:Fma_ir_single_bottom.jpg|thumb|left|300px|IR Vertical Sensor Board Bottom]]
| |
| |[[Image:Fma_ir_single_up.jpg|thumb|left|290px|IR Vertical Sensor Board Top]]
| |
| |}
| |
|
| |
| The same operation can be done with the vertical sensor (single axis). The resistor R3 should be changed from a 510 ohm to a 1K ohm.
| |
|
| |
| ''a suitable resistor from mouser is [http://www.mouser.com/search/productdetail.aspx?R=RK73H1JTTD1001Fvirtualkey66000000virtualkey660-RK73H1JTTD1001F here]''
| |
 Infrared Sensors Infrared Sensors
|
Hardware support for previous, currently in use and future infrared boards.
|
|
|
Infrared Stabilisation Principle
The paparazzi autopilot uses infrared thermopiles for primary attitude sensing. The theory is that at zero bank or pitch angle, the difference in the heat between the two sensors should be zero, and at 90 degrees it should be maximum. From this relationship a linear regression is made and angles are calculated during flight.
Each pair of sensors measures one axis, a minimum of 2 pairs must be used to measure pitch and roll but best results are obtained thru the use of a 3rd pair on the vertical axis. Since the output signal from each sensor pair is proportional to both the attitude and the weather/terrain, systems with only x-y sensors require a ground calibration and may not provide accurate angle calculations as the aircraft travels over terrain with different IR radiation.
Hardware Architecture
Horizontal Board
Vertical Board
Thermopiles
The Thermopiles are:
Manufacturer Part Number: MLX90247-ESF-DSA (Digi-Key: MLX90247-ESF-DSA-ND)
Description: IC SENS THERMOPILE W/THERM TO-39




