Difference between revisions of "Krooz"
Jump to navigation
Jump to search
| Line 8: | Line 8: | ||
== Features == | == Features == | ||
'''Krooz''' is based on the 64 pins | '''Krooz''' is based on the 64 pins STM32F405RGT6 [http://www.st.com/internet/mcu/product/252144.jsp Cortex M4] 168MHz processor featuring a Floating point unit (FPU), up to 192k of RAM and 1024k of FLASH. | ||
* STM32 microcontroller [http://www.st.com/internet/com/TECHNICAL_RESOURCES/TECHNICAL_LITERATURE/DATASHEET/ | * STM32 microcontroller [http://www.st.com/internet/com/TECHNICAL_RESOURCES/TECHNICAL_LITERATURE/DATASHEET/DM00037051.pdf STM32F405RGT6 datasheet] with 1024kB flash and up to 192kB RAM | ||
* [http://www.google.de/url?sa=t&rct=j&q=mpu6050&source=web&cd=1&cad=rja&sqi=2&ved=0CCIQFjAA&url=http%3A%2F%2Fwww.invensense.com%2Fmems%2Fgyro%2Fmpu6050.html&ei=6b91UOfSO8rLsgau2YDQCg&usg=AFQjCNEhlm4F_vWyavE707bN2IH3I6KmqQ MPU6050 Gyro/Accelerometer sensor] | * [http://www.google.de/url?sa=t&rct=j&q=mpu6050&source=web&cd=1&cad=rja&sqi=2&ved=0CCIQFjAA&url=http%3A%2F%2Fwww.invensense.com%2Fmems%2Fgyro%2Fmpu6050.html&ei=6b91UOfSO8rLsgau2YDQCg&usg=AFQjCNEhlm4F_vWyavE707bN2IH3I6KmqQ MPU6050 Gyro/Accelerometer sensor] | ||
* [http://www.microchip.com/stellent/idcplg?IdcService=SS_GET_PAGE&nodeId=2885¶m=en547232 MRF24WB0 WiFi] or [http://www.taiwantrade.com.tw/resources/member/276716/productcatalog/b9ee22e4-e94a-45cd-8db0-ac88b3a11a75_BTM222%20DataSheet.pdf BTM-222] Bluetooth (wire or external antenna connector) module on board. | * [http://www.microchip.com/stellent/idcplg?IdcService=SS_GET_PAGE&nodeId=2885¶m=en547232 MRF24WB0 WiFi] or [http://www.taiwantrade.com.tw/resources/member/276716/productcatalog/b9ee22e4-e94a-45cd-8db0-ac88b3a11a75_BTM222%20DataSheet.pdf BTM-222] Bluetooth (wire or external antenna connector) module on board. | ||
Revision as of 14:50, 5 December 2012

Overview
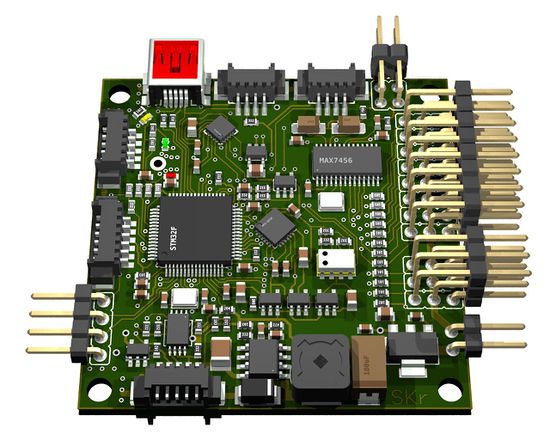
Krooz autopilot board is an all in one rotorcraft solution, with a wide variety of sensors, modules and units on one board in market usual Rotorcraft size.
Features
Krooz is based on the 64 pins STM32F405RGT6 Cortex M4 168MHz processor featuring a Floating point unit (FPU), up to 192k of RAM and 1024k of FLASH.
- STM32 microcontroller STM32F405RGT6 datasheet with 1024kB flash and up to 192kB RAM
- MPU6050 Gyro/Accelerometer sensor
- MRF24WB0 WiFi or BTM-222 Bluetooth (wire or external antenna connector) module on board.
- MS5611Pressure sensor
- MAX7456 OSD module
- 7 x Analog input channels
- 4 x 3.3V TTL UART (5V tolerant)
- 11 x Servo PPM outputs (or 10 if using PPM output receiver)
- 1 x I2C 5V bus
- 1 x Micro USB
- Extra camera control connector
- 3 x status LEDs with attached test point
- Up to 35V (8S LiPo) input power control unit
- ~50mm x ~50mm x ~10mm
- 2 layers PCB design
So, except for a GPS unit with the Krooz you have all necessary sensors for full features all in one rotorcraft solution.
Usage scenarios
Krooz can be used in different telemetry versions:
- with the on-board MRF24WB0 WiFi module

- with the on-board BTM-222 Bluetooth module

- or without any on-board telemetry solution, with a possibility to connect other telemetry link over one of the UART connectors.
Hardware design
Pinout


Programming
Getting started
The software will soon be available from the repo
Bootloader
"Krooz" uses a bit modified Luftboot bootloader from Paparazzi Il will soon be available from repo