Advanced Navigation Routines
Flower

The flower navigation routine flies the aircraft in a flower pattern defined by two waypoints. The center waypoint defines the center of the flower and the altitude the plane flies at. The edge waypoint defines the radius of the flower. To use this navigation routine, you need to include OSAMNav.h in your flight plane and OSAMNav.c to your airframe file. Then you can add flower to your flight plan like so...
<block name="Flower">
<call fun="InitializeFlower(WP_Center,WP_Edge)"/>
<call fun="FlowerNav()"/>
</block>
Bungee Takeoff
The bungee takeoff routine helps to automate takeoff by turning the throttle on after the bungee has been release from the hook. The only waypoint you need for this routine is the position of where the bungee is pegged to the ground. Using this waypoint, a line is drawn from the position of the aircraft (when the routine is initialized) to the bungee waypoint. This line is called the launch line. When the plane is released, it follows the launch line with the throttle off until it crosses the throttle line. The throttle line is a line perpendicular to the launch line at a distance d from the bungee waypoint (see the diagram below). When the plane crosses the throttle line, the throttle comes on. After the throttle comes on, the plane keeps going straight until it reaches a specified speed and altitude above the bungee waypoint altitude. When it reaches the takeoff speed and takeoff altitude, the next block in the flight plan is executed. The takeoff speed, takeoff altitude and the distance d from the bungee waypoint are specified in the airframe file. You will need to add those values to your airframe file like this...
<section name="Takeoff" prefix="Takeoff_"> <define name="Height" value="30" unit="m"/> <define name="Speed" value="15" unit="m/s"/> <define name="Distance" value="5" unit="m"/> </section>
To use this navigation routine, include OSAMNav.h in your flight plan and OSAMNav.c to your airframe file. Then you can add the bungee takeoff routine to your flight plan like so...
<block name="Takeoff" strip_button="Takeoff (wp CLIMB)" strip_icon="takeoff.png"> <call fun="InitializeBungeeTakeoff(WP_Bungee)"/> <call fun="BungeeTakeoff()"/> </block>
The stage bungeetakeoff has also been added to Flightplan.dtd so you can also use the bungee takeoff routine like this.
<block name="Takeoff" strip_button="Takeoff (wp CLIMB)" strip_icon="takeoff.png"> <bungeetakeoff BungeeWP="Bungee"/> </block>
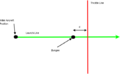
Bungee takeoff diagram

After bungee takeoff initialization

After crossing the throttle line


