Difference between revisions of "Umarim Lite v2"
Jump to navigation
Jump to search
(→Pinout) |
|||
| Line 189: | Line 189: | ||
|} | |} | ||
''Note: MiniUSB and Molex USB connectors are in parallel, only one can be connected at a time.'' | ''Note: MiniUSB and Molex USB connectors are in parallel, only one can be connected at a time.'' | ||
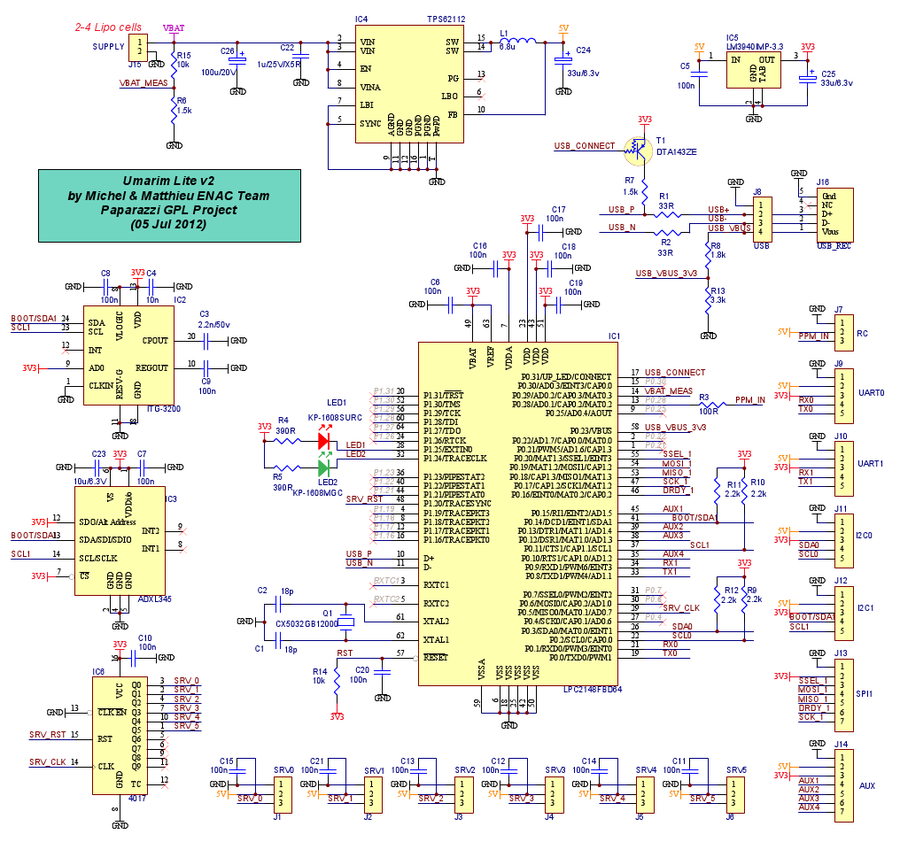
== Schematic == | |||
[[Image:UmarimLite_v2_Schematic.png|left|900px|Umarim V1.0 Schematic]] | |||
<br style="clear:both"> | |||
Revision as of 05:12, 5 July 2012

Hardware Revision History
| Version # | Release Date | Release Notes |
|---|---|---|
| v2 | 07/2012 | Minor PCB modifications |
| v1 | 03/2012 | Initial release of Umarim Lite |
Features
- NXP LPC2148 MCU based
- 1 x Triple axis Digital Gyroscope (Invensense ITG-3200)
- 1 x Triple axis Digital Accelerometer (Analog Devices ADXL345)
- 6 x Servo PWM outputs
- 1 x R/C receiver PPM frame input
- 2 x UART (TTL 3.3V, 5V tolerant)
- 2 x I2C bus
- 1 x SPI bus
- 1 x USB (client)
- 4 x General Purpose I/O or Analog input channels (0V - 3.3V)
- 5v / 1.5A switching power supply (input voltage range 5.5V min → 17.0v max)
- 3.3v / 1A linear regulator
- 2 x status LEDs
- ?? grams (0,?? oz)
- 53 x 25mm (2.1" x 0.98")
- 4 layers PCB design / single side SMD components
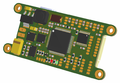
Umarim Lite v2 3D bottom view
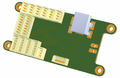
Umarim Lite v2 3D top view
- UmarimLite v2 top side.png
Umarim Lite v2 top side
- UmarimLite v2 bottom side.png
Umarim Lite v2 bottom side

Pinout
Pins Name and Type are specified with respect to the Autopilot Board

| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | +5V | PWR | 5V Rail from autopilot | Orange |
| 3 | SRVx | OUT | Servo signal (PWM) | White |
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | +5v | PWR | 5V Rail from autopilot | Orange |
| 3 | PPM_IN | IN | PPM Stream from R/C Receiver (5V tolerant) | White |
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | +3.3V | PWR | 3.3V Rail from autopilot | Red |
| 3 | SSEL1 | IN | SSP Slave Select. Selects the SSP interface as a slave (SSEL1) | Brown |
| 4 | MOSI1 | I/O | SPI1 Master Out Slave In. Data output from master / data input to slave | Grey |
| 5 | MISO1 | I/O | SPI1 Master In Slave Out. Data input to master / data output from slave | Green |
| 6 | DRDY1 | IN | External interrupt 0 input (EINT0) | Purple |
| 7 | SCK1 | I/O | SPI1 Serial clock. Clock output from master or input to slave | Yellow |
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | +5V | PWR | 5V Rail from autopilot | Orange |
| 3 | +3.3V | PWR | 3.3V Rail from autopilot | Red |
| 4 | AUX1 | I/O | General Purpose I/O #1 or ADC Input ADC_0 (lpc AD1.5) | |
| 5 | AUX2 | I/O | General Purpose I/O #2 or ADC Input ADC_1 (lpc AD1.4) | |
| 6 | AUX3 | I/O | General Purpose I/O #3 or ADC Input ADC_2 (lpc AD1.3) | |
| 7 | AUX4 | I/O | General Purpose I/O #4 or ADC Input ADC_3 (lpc AD1.2) |
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | +5V | PWR | 5V Rail from autopilot | Orange |
| 3 | +3.3V | PWR | 3.3V Rail from autopilot | Red |
| 4 | RXD0 | IN | UART0 Serial Input (3.3V level, 5V Tolerant) | Green |
| 5 | TXD0 | OUT | UART0 Serial Output (3.3V level) | Blue |
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | +5V | PWR | 5V Rail from autopilot | Orange |
| 3 | +3.3V | PWR | 3.3V Rail from autopilot | Red |
| 4 | RXD1 | IN | UART1 Serial Input (3.3V level, 5V Tolerant) | Green |
| 5 | TXD1 | OUT | UART1 Serial Output (3.3V level) | Blue |
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | +5V | PWR | 5V Rail from autopilot | Orange |
| 3 | +3.3V | PWR | 3.3V Rail from autopilot | Red |
| 4 | SDA0 | Open Drain I/O |
I2C0 bus Serial DAta | Brown |
| 5 | SCL0 | Open Drain I/O |
I2C0 bus Serial CLock | Blue |
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | +5V | PWR | 5V Rail from autopilot | Orange |
| 3 | +3.3V | PWR | 3.3V Rail from autopilot | Red |
| 4 | SDA1 BOOT |
Open Drain I/O |
I2C1 bus Serial DAta In-Circuit Serial Programming (ISP) enable (P0.14, +3.3v pullup) (Note) |
Brown |
| 5 | SCL1 | Open Drain I/O |
I2C1 bus Serial CLock | Blue |
Note: Holding this pin low for at least 3mS after a RESET (or power up) instructs the controller to enter programming mode.
| Pin # | Name | Type | Description | Color |
|---|---|---|---|---|
| 1 | GND | PWR | common ground | Black |
| 2 | USB+ | I/O | USB bidirectional D+ line | Green |
| 3 | USB- | I/O | USB bidirectional D- line | White |
| 4 | VBUS | IN | Indicates the presence of USB bus power (P0.23) (5V level) | Orange |
Note: MiniUSB and Molex USB connectors are in parallel, only one can be connected at a time.
Schematic
