Difference between revisions of "Laserhawk"
Jump to navigation
Jump to search
| Line 17: | Line 17: | ||
Questions : | Questions : | ||
: Distance from launch point to zone of interest : | : Distance from launch point to zone of interest : 1-2 km | ||
: Size of zone of interest : | : Size of zone of interest : 500 x 500 m | ||
:Will stay in standby while waiting for zone of interest coordinates from ground robot or will go home? | :Will stay in standby while waiting for zone of interest coordinates from ground robot or will go home? | ||
Revision as of 01:41, 5 April 2011

LaserHawk Project Description
Lidar UAV for traversability map generation
High-level Goals

- Autonomous flights of Multiplex Mentor UAV with onboard payload including:
- Generate traversability map that can be transmitted to UGV
- cartesian coordinates with traversability probabilities/confidence
Elrob competition details
Questions :
- Distance from launch point to zone of interest : 1-2 km
- Size of zone of interest : 500 x 500 m
- Will stay in standby while waiting for zone of interest coordinates from ground robot or will go home?
- Will standby waypoint need to follow ground robot as it travels?
- How long aircraft on alert for acquisition requests? Hours?
- Terrain map/data downloaded to ground station/groundbot via xbee or wifi or what? file transfer or socket? raw data options?
Current Tasks and Priorities
| Num | Name | Notes | Priority | Status |
|---|---|---|---|---|
| 1 | Acquire ground Lidar/attitude data while we wait for plane | use PC then gumstix. Hokuyo and MTIG mounted on boom. biketest git directory has initial data ) | x | In progress |
| 2 | start flying mentor airframe | Maiden manual flight accomplished. autonomous flying to come next | x | In progress |
| 3 | Be able to treat realtime or recorded data from real or virtual data | Some initial application code done, integrating all together next | x | In progress |
| 4 | Lit review | x | x | In progress |
| x | x | x | x | x |
| x | x | x | x | x |
| x | x | x | x | x |
Mentor1 build todo
- reinforce wings
- get new 60+ A ESC
- make live sensor interface PC app to monitor on ground during acquisition
- make hokuyo power switchable via GPIO (from tiny)
- see if current probe limited to 25A
- Attach GPS antenna
Have Bertand Do
- rebuild omap MTI ipk for GPS support
- check in paparazzi mods
Architecture
- Communication
- autopilot/groundstation - standard paparazzi Datalink/Telemetry serial modem-based com
- gumstix/ground - wifi for debugging
- UAV to UGV com : 115.2kbps Xbee Pro link (data reliability testing needed)
Hardware
Airborne
- Airframe : Multiplex LAAS Mentor

Ground
- Who cares? laptops, modems, and antennae should suffice
Software
Version control : github
Airborne
- Overo
- OS: openembedded-built linux (switch to ibara's rt-based lisa branch?)
- Drivers: hokuyo/xsens stuff (Bertand's notes ; overo ipkg files built on borderouge )
- apps:
- mainloop for sensor data processing
- coordination with ground
- coordination with autopilot
- Autopilot
- paparazzi LPC2148-based firmware
Ground
- Paparazzi ground package
- gdhe for data visualization (polyline representations of laser scan lines)
GIT Projects:
- hoku2gdhe - Demo app uses hokuyo and Xsens MTI sensor and generates polylines in GDHE
- hokuyomti - App for aquiring hokuyo data and storing to file (Run in parallel with MTIHardTest)
- log2gdhe - App for visualising stored log (real or virtual) in gdhe
- log2gdhe/mkvirtlog - scripts for generating scan/attitude logs from a virtual terrain model
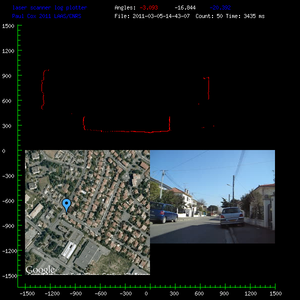
- biketest/scripts - scripts for generating images/animations from stored hokuyo/mti logs



Plotlogs image output. view animation
More info in the git README
- The goal is to fuse all of these capabilities into one package that allows:
- displaying real or virtual data
- live data, recording, and/or playback
- display raw data in 2d plots (scan data along scan plane, attitude, position, altitude, etc)
- rectify scan data using attitude and send 3d points to gdhe or store (where? what format?)
- later on will treat data to generate terrain model / traversability map / whatever
- not all of this needs to run on overo, just the acquisition and data treatment (some part of it anyways)
- more?
Geometry
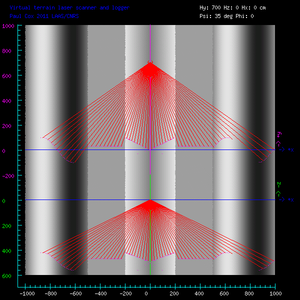
| Laserhawk geometry | |
|---|---|
 |
 |
- nominal UAV flight velocity : 20-30 m/s
- nominal UAV flight height AGL : 30 m
- Lidar sensor resolution : 1080 points over 270 deg visible (1440 points over 360 deg) @40Hz
- ground covered distance during one revolution of scanner:

- For 90° interest zone :
- scan line advances down ground track :
- scan line proceeds along sensor rotation (for a 90 scan, this is twice the AGL height) :
- Resolution :
cm between pixels - Angle relative to track :
(negligible relative to crab angle)




{kind=link}
{kind=link}
{kind=link}
Scratchpad
MTI comand line application, for dumping attitude/GPS of MTIG to file : (PC and overo)
MTIHardTest /dev/ttyUSB0 -o 2 -d 6 -v >> MTIG.out
record laser scans to disk (PC and overo) hokuyomti /dev/ttyACM0
scan and display on gdge (PC only for now)
hoku2gdhe
Risks
| Num | Name | Notes | Priority | Status |
|---|---|---|---|---|
| 1 | Lidar performance | at 30m flight height, over low-reflectance surfaces (asphalt roads, grass, dirt) | x | |
| 2 | Crashing Lidar | Will build metal/foam box for protection | x | x |
| 3 | Radio interference at Elrob | need robust behaviors with lost com | x | x |
| x | x | x | x | x |
| x | x | x | x | x |
| x | x | x | x | x |